|
||
| ÕĪæµ¢Ö | ŖÖĪĶāČ | ŠUżń╗┤ | µČéµ¢ÖõĖĵčaÕó?/a> | ĶāČń▓śÕē?/a> | ÕżŹÕÉłµØɵ¢Ö | ń¤ø_ī¢ | Õī¢ÕĘź | õ╗¬ÕÖ©õ╗¬ĶĪ© | µ¢ŅC±öõĖ?/a> | õĖōķóś | śqöÕø×ķ”¢ķĪĄ |
||
|
||
| ÕĪæµ¢Ö | ŖÖĪĶāČ | ŠUżń╗┤ | µČéµ¢ÖõĖĵčaÕó?/a> | ĶāČń▓śÕē?/a> | ÕżŹÕÉłµØɵ¢Ö | ń¤ø_ī¢ | Õī¢ÕĘź | õ╗¬ÕÖ©õ╗¬ĶĪ© | µ¢ŅC±öõĖ?/a> | õĖōķóś | śqöÕø×ķ”¢ķĪĄ |
||
Õ¤▐Z║ĵ¤öµĆ¦ÕżŹÕÉłµØɵ¢ÖńÜäÕÄŗÕŖøõ╝Āµä¤ÕÖ©Õ£©Õī╚Ø¢ŚÕüźÕ║ĘńøæµĄŗÕQīĶ╩YõĮōµ£║ÕÖ©õØhÕÆīÕÅ»ĮI┐µł┤Ķ«æųżćõĖŁÕģʵ£ēÕ╣┐µ│øńÜäńö©ķĆöŃĆéńäČĶĆīńø«ÕēŹµŖźķüōńÜ䵤öµĆ¦ÕÄŗÕŖøõ╝Āµä¤ÕÖ©ÕŠĆÕŠĆÕģõh£ēĶŠāõĮÄńÜäÕÄŗÕŖøńüĄµĢÅÕ║”µł¢ĶŠāĮHäńÜäÕÄŗÕŖøµä¤Õ║öĶīāÕø┤ŃĆéĶ┐æ“q┤µØźõĖĆõ║øµ¤öµĆ¦ÕÄŗÕŖøõ╝Āµä¤ÕÖ©ķĆÜĶ┐ćĶ«ŠĶ«ĪńēęÄ«ŖńÜäĶĪ©ķØóÕ«ÅĶ¦éń╗ōµ×ä’╝īõŠŗÕ”éÕŠ«ńÉāńŖČń¬üĶĄ°P╝īµØźµÅÉķ½śńüĄµĢÅÕ║”ŃĆéńäČĶĆī’╝īśqÖõ║øõ╝Āµä¤ÕÖ©ńÜäÕÄŗÕŖøńüē|ĢÅÕ║”Õ£©ķ½śÕÄŗõĖŗµĆźÕē¦õĖŗķÖŹŃĆéĶ┐Öõ╣¤µś»Õż¦ÕżÜµĢ░ÕƤÕŖ®ĶĪ©ķØóŠlōµ×äµÅÉķ½śńüē|ĢÅÕ║”ńÜäÕÄŗÕŖøõ╝Āµä¤ÕÖ©ńÜäõĖ╗Ķ”üŠ~║ķÖĘŃĆ?/span>
µŠø_ż¦Õł®õ║Üõ╝ŹõļuĶ┤ĪÕż¦ÕŁ”µØÄÕŹ½ÕŹÄµĢֵijĶ»∙NóśŠlä’╝īĶŗ▒ÕøĮõ╝»µśÄŠś░Õż¦ÕŁ”ÕöÉĶ»ŚµØ©ÕŹÜÕŻ½Ķ»∙NóśŠlä’╝īŠ¤ÄÕøĮÕīŚÕŹĪŠ|ŚĶÄ▒ŠUø_Ę×ń½ŗÕż¦ÕŁ”Michael D. DickeyµĢֵijõ╗źÕÅŖõĖŁÕøĮ┐UæÕŁ”µŖƵ£»Õż¦ÕŁ”Õ╝ĀõĖ¢µŁ”µĢֵijĶ»∙NóśŠl?/span>Õłøµ¢░µĆ¦Õ£░׫åÕżŹÕÉłµØɵ¢ÖńÜäÕŠ«Ķ¦éÕĪ½µ¢ÖŠ|æń╗£õĖÄÕ«ÅĶ¦éÕćĀõĮĢń╗ōµ×äĶ«ŠĶ«ĪńøĖŠlōÕÉłÕQīķĆÜĶ┐ćĶŠāõžōĮÄĆÕŹĢńÜäÕŖĀÕĘźĮEŗÕ║ŵłÉÕŖ¤Õ╝ĆÕÅæÕć║õĖĆ┐UŹÕ¤║õ║ÄEcoflexńÜäµČ▓µĆüķćæÕ▒×ńŻüŗ╣üÕÅśÕ╝ęÄƦõĮōÕQ?/span>E-LMMREÕQēķ½śńüē|ĢÅÕ║”ÕÄŗÕŖøõ╝Āµä¤µØɵ¢ÖŃĆ?/span>Õ¤▐Z║ÄśqÖń¦ŹÕżŹÕÉłµØɵ¢ÖńÜäÕÄŗÕŖøõ╝Āµä¤ÕÖ©Õ£©õĮÄÕÄŗÕŖø(~2 PaÕQ?/span>4.31 kPa-1)ÕÆīķ½śÕÄŗÕŖø(>3 kPaÕQ?/span>2.28 kPa-1)õĖŗķāĮÕģõh£ēµ×üķ½śńÜäńüĄµĢÅÕ║”ÕQ?/span>õ╝Āµä¤µĆ¦ĶāĮµśŠĶæŚŁæģĶČŖõĖ└LĄüµ¤öµĆ¦õ╝Āµä¤ÕÖ©ŃĆ?/span>µ£¼ÕĘźõĮ£õ╗źŌĆ?/span>Liquid Metal Hybrid Composites with High-Sensitivity and Large Dynamic Range Enabled by Micro- and Macrostructure EngineeringŌĆØõžōµĀćķóśÕQīÕÅæĶĪ©Õ£©ACS Applied Polymer MaterialsÕQłDOIÕQ?/span>10.1021/acsapm.1c01111ÕQēŃĆ?/span>
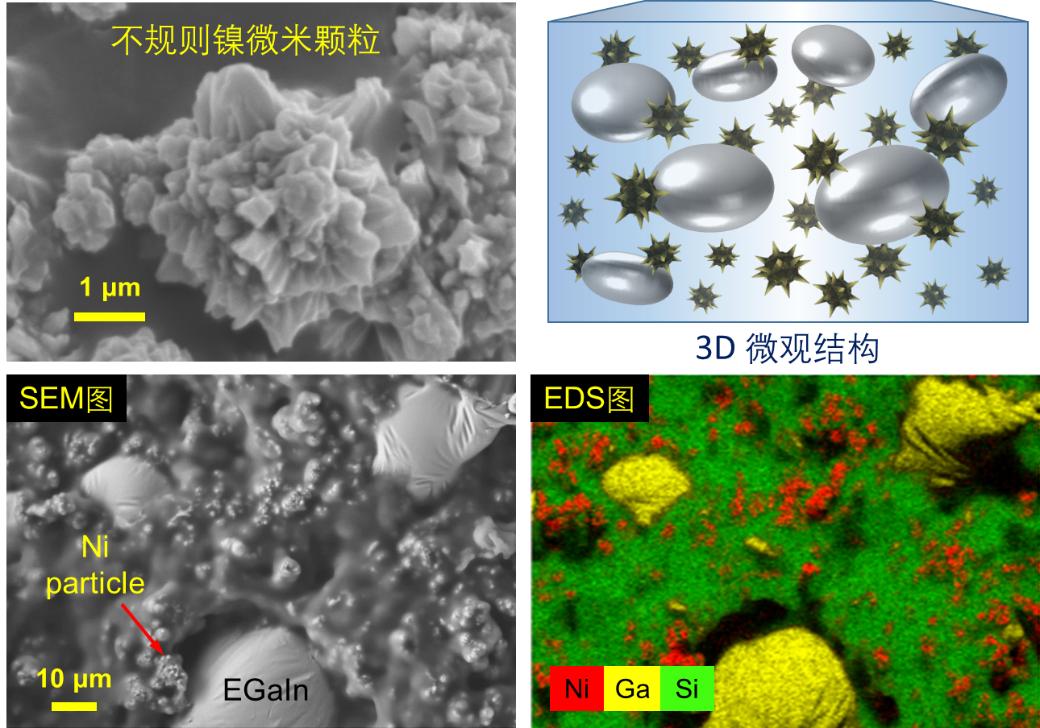
ÕøŠõĖĆ E-LMMREńÜäń®║ķŚ┤ń╗ōµ×äÕÅŖńöĄķĢ£ÕÆīÕģāń┤ĀÕłåÕĖāÕøŠ
E-LMMREµś»õĖĆ┐UŹõ╗źEcoflex╝ŗģµ®ĪĶāČõžōÕ¤°Ö┤©ÕQīÕĪ½ÕģģÕ░¢Õł║Õ┼×ķĢŹÕŠ«Šc│ķóŚŠ_ÆÕÆīµČ▓µĆüķćæÕ▒×ÕŠ«µČ▓µ╗┤µĘĘÕÉłÕĪ½µ¢ÖńÜäÕ»╝ńöĄÕ╝╣µĆ¦õĮōŃĆ鵣żÕżäõŗ╔ńö©ńÜäµČ▓µĆüķćæÕ▒×õžōķĢōķō¤ÕÉłķćæÕQłEGaInÕQ?5% Ga, 25% InÕQēŃĆéńøĖµ»öõ║ÄńÉāÕ┼×ķóŚń▓ÆÕQīõĖŹĶ¦äÕłÖķĢŹķóŚŠ_ÆĶĪ©ķØóńÜä׫¢Õł║ĮHüĶōvõĮ┐Õģȵø┤Õ«╣µśōÕ£©ÕżŹÕÉłµØɵ¢ÖÕÅśÕ┼×µŚČõĖÄÕæ©Õø┤ńÜäÕ»╝ńöĄÕĪ½µ¢ÖńøĖµÄźĶ¦”ŃĆéķĢŹķóŚń▓Æ-µČ▓µĆüķćæÕ▒×µČ▓µ╗┤Õ┼×µłÉńÜäÕø?/span>-µČ▓µž£ÕÉłÕĪ½µ¢ÖńĮæŠl£õŗ╔µØɵ¢ÖńÜäńöĄÕ»╝ńÄćÕģõh£ēµ×üķ½śńÜäÕ║öÕÅśńüĄµĢÅÕ║”ŃĆ?/span>EcoflexÕ¤°Ö┤©ńÜäõĮÄÕ╝ęÄƦµ©ĪķćÅĶ┐øõĖƵŁźÕó×Õ╝▐Z║åE-LMMREńÜäÕÄŗÕŖøńüĄµĢÅÕ║”ŃĆ?br />

ÕøŠõ║ī ÕłåÕł½õ╗?/span>EcoflexÕÆīPDMSõĖ║Õ¤║Ķ┤©ńÜäLMMREńÜäńöĄÕ»╝ńÄć-Õ║öÕŖøµø▓ń║┐Õ»ęÄ»ö
ÕøŠõ║īµśäĪż║õ║?/span>E-LMMREńÜäķ½śÕÄŗÕŖøńüē|ĢÅÕ║”ŃĆéõžōśqøĶĪīµ»öĶŠāÕQīµłæõ╗¼ÕłČÕżćõ║åÕ¤▐Z║ÄPDMSÕ¤°Ö┤©ńÜ?/span>LMMREÕQ?/span>P-LMMREÕQēŃĆéÕĮōÕ║öÕŖøõ╗?/span>0Õó×ÕŖĀÕł?20 kPaµŚė×╝īE-LMMREńÜäńöĄÕ»╝ńÄćµĆźÕē¦Õó×ÕŖĀõ║?/span>ŁæģĶ┐ćõĖĆõ║┐ÕĆ?/span>ÕQīµśŠĮC║Õć║ŁæģĶ┐ćÕćĀõ╣ĵēƵ£ēÕĘ▓µŖźķüōÕ»╝ńöĄÕżŹÕÉłµØɵ¢ÖńÜäķ½śńüē|ĢÅÕ║”ŃĆéńøĖµ»öõ╣ŗõĖŗ’╝īP-LMMREńÜäńöĄÕ»╝ńÄćõ╗ģÕó×ÕŖĀõ║å20ÕĆŹŃĆéĶ┐ÖõĖ╗Ķ”üµś»ńö▒õ║Äõ║īĶĆģµśŠĶæŚńÜäÕ╝ęÄƦµ©ĪķćÅÕĘ«Õ╝éŃĆéÕ£©ńøĖÕÉīķģŹµ»öõĖŗ’╝īE-LMMREńÜäÕ╝╣µĆ¦µ©ĪķćÅõ╗ģõĖ?/span>P-LMMREńÜäÕģŁÕłåõ╣ŗõĖĆŃĆ鵣żÕż¢ÕøŠõ║īĶ┐śµśäĪż║LMMREÕŹ│õŗ╔Õ£©µŗēõ╝ĖµŚČńöĄÕ»╝ńÄćõŠØńäȵƟÕē¦Õó×ÕŖĀŃĆéĶ┐Ö┐UŹÕÅŹÕĖĖńÜäÕ║öÕŖøÕ║öÕÅśÕōŹÕ║öĶ¦ŻÕå│õ║åÕģłÕēŹńÜäŠlØÕż¦ÕżÜµĢ░ÕżŹÕÉłµØɵ¢ÖÕ£©µŗēõ╝ĖÕ║öÕÅśõĖŗńöĄÕ»╝ńÄ浜ŠĶæŚõĖŗķÖŹńÜäķŚ«ķóśÕQīµŗōÕ▒Ģõ║åLMMREńÜäÕ║öńö©ĶīāÕø┤ŃĆ?br />
ÕøŠõĖē Õģõh£ēõĖŹÕÉīĶĪ©ķØóŠlōµ×äńÜ?/span>E-LMMREĶå£ńÜäńöĄķś╗ÕÆīÕ║öÕŖøÕ║öÕÅśÕłåÕĖāÕ»╣µ»?/span>
Õ£?/span>E-LMMREńÜäÕ¤║╝ŗĆõĖŖ’╝īµłæõ╗¼ķĆÜĶ┐ćĶĪ©ķØóÕ«ÅĶ¦éŠlōµ×äĶ«ŠĶ«ĪÕ╝ĆÕÅæõ║åÕģõh£ēµø┤ķ½śÕÄŗÕŖøńüē|ĢÅÕ║”ńÜäE-LMMREĶ壒╝ī“qČÕ║öńö©Õ£©µÖ°ÖāĮÕÄŗµä¤ÕŖĀńāŁĶŻģńĮ«ÕÆīµ¤öµĆ¦ÕÄŗÕŖøõ╝Āµä¤ÕÖ©õĖŁŃĆ鵳æõ╗¼Õ£©µŁżÕ░ØĶ»Ģõ║åõĖżń¦ŹĶĪ©ķØóŠlōµ×äÕQÜķö»ķĮ┐Õ┼׊lōµ×äÕÆīķćæÕŁŚÕĪöÕĮóÕćĖĶĄ’L╗ōµ×äŃĆéÕøŠõĖēCÕ»ęÄ»öõ║åÕŃ^ķØ?ķö»ķŗ╔/ķćæÕŁŚÕĪöÕ┼×Ķå£ńÜäńöĄķś╗-ÕÄŗÕŖøµø▓ń║┐ÕQīÕÅ»õ╗źń£ŗÕć║ķćæÕŁŚÕĪöÕĮóĶå£Õģõh£ēµ£Ćķ½śńÜäńöĄÕ»╝ńÄćõĖÄÕÄŗÕŖøńüē|ĢÅÕ║”ŃĆ鵳æõ╗¼ķĆÜĶ┐浩Īµŗ¤ÕŹĢõĖ¬ķö»ķŗ╔ÕĮóµł¢ķćæÕŁŚÕĪöÕ┼×ĮHüĶ¦”Õ£©ÕÄŗÕŖøõĖŗńÜäÕ║öÕŖøÕ║öÕÅśÕłåÕĖāĶ¦ŻķćŖõ║åśqÖõĖĆńÄ░Ķ▒ĪŃĆéõžōõĮ┐ÕżŹÕÉłµØɵ¢ÖĶå£õ║¦ńö¤10%ńÜäÕÄŗŠ~®Õ║öÕÅś’╝īÕ»╣õ║Ä“q│ķØóĶå£Ķć¬ńäēÖ£ĆĶ”?0%ńÜäLMMREÕ╝ęÄƦµ©ĪķćÅŃĆéĶĆīÕ»╣õ║Äķö»ķĮ┐Õ┼×µł¢ķćæÕŁŚÕĪöÕĮ?/span>LMMREĶ壒╝īµēĆķ£ĆÕÄŗÕ╝║ÕłåÕł½õ╗ģõžō3%µł?%Õ╝ęÄƦµ©ĪķćÅŃĆ鵳æõ╗¼ńÜäńĀöń®ČĶĪ©µśÄLMMREńÜäńöĄÕ»╝ńÄćõ╗ģõĖÄÕģČÕ║öÕÅśµ£ēÕģ¤ļĆéÕøĀµŁż’╝īķćæÕŁŚÕĪöĶå£ÕŬķ£Ć“q│ķØóĶå?/span>1/10ńÜäÕÄŗÕ╝║ÕŹ│ÕÅ»õ±öńö¤ńøĖÕÉīńÜäńöĄķś╗ÕÅśÕī¢ÕQīµŹóŁaĆõ╣ŗķćæÕŁŚÕĪöĶå£ńÜäÕÄŗÕŖøńüē|ĢÅÕ║”õžō“q│ķØóĶå£ńÜä10ÕĆŹŃĆ?/span>

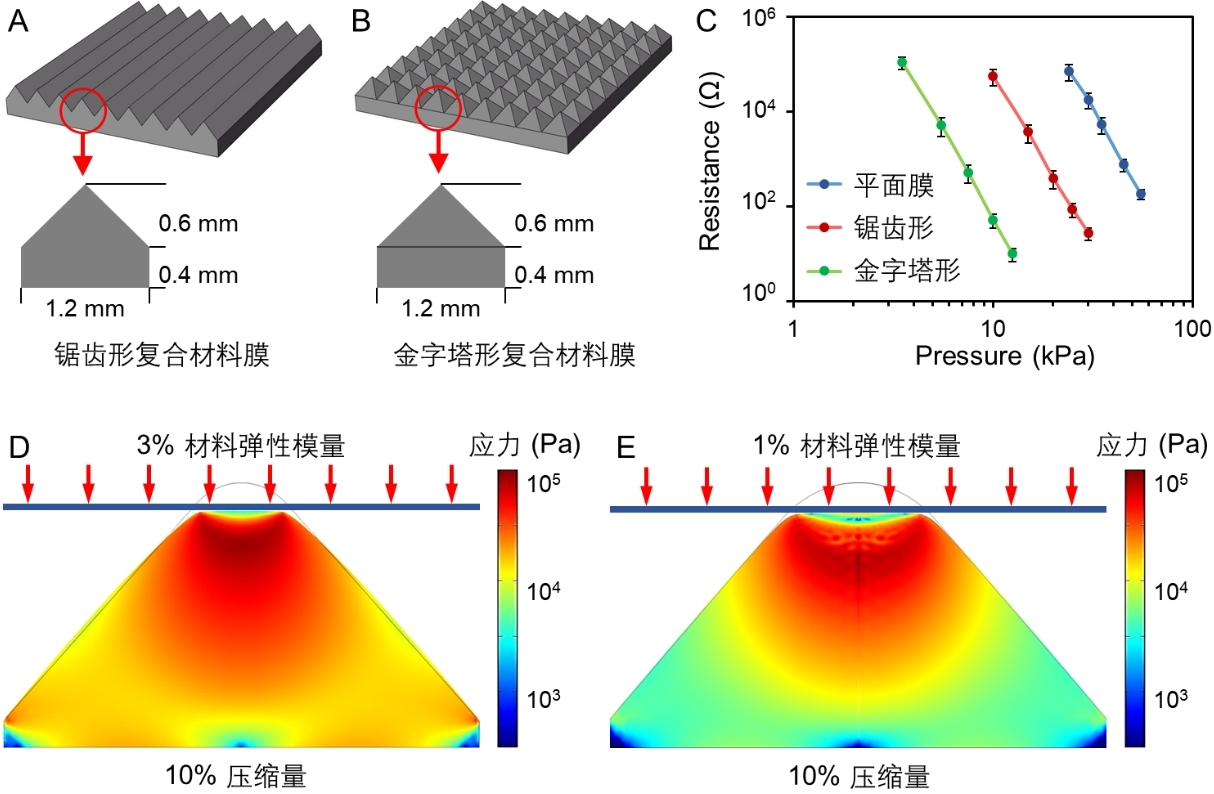
Õøæųøø Õ¤▐Z║ÄÕÅīÕ▒éE-LMMREķö»ķŗ╔Ķå£ńÜäķ½śńüĄµĢÅÕ║”Õ«ĮµŻĆŗ╣ŗĶīāÕø┤ÕÄŗÕŖøõ╝Āµä¤ÕÖ©
Õ¤▐Z║ÄÕģõh£ēńēęÄ«ŖĶĪ©ķØóŠlōµ×äńÜ?/span>E-LMMREĶ壒╝īµłæõ╗¼Õ╝ĆÕÅæõ║åÕģõh£ēķ½śÕÄŗÕŖøńüĄµĢÅÕ║”ÕÆīÕłåĶŠ©ńÄćńÜ䵤öµĆ¦ÕÄŗÕŖøõ╝Āµä¤ÕÖ©ŃĆéõ╝Āµä¤ÕÖ©ńÜäń╗ōµ×äÕ”éÕøæųøøµēĆĮC║ŃĆ鵳æõ╗¼Õ░åõĖżõĖ¬E-LMMREķö»ķŗ╔ÕĮóĶ¢äĶå£ķØóÕ»ÜwØóµöäĪĮ«ÕQīķö»ķĮ┐ń╗ōµ×äÕĮ╝µŁżÕ×éńø┤ŃĆéÕ£©ÕÄŗńŠāśqćń©ŗõĖŁ’╝īÕ║öÕŖøķøåõĖŁÕ£©ķö»ķĮ┐ń╗ōµ×äÕ░¢ń½»ńÜäµÄźĶ¦”ńé╣õĖŖõ╗źµöŠÕż¦õ╝Āµä¤ÕÖ©ńÜäĶĪ©ķØóÕÄŗÕŖø’╝īÕ»ŲDć┤µø┤µśŠĶæŚńÜäÕÅśÕ┼×ÕÆīµø┤ķ½śńÜäńüē|ĢÅÕ║”ŃĆéµĀ╣µŹ«ÕøŠÕøøCńÜäõ╝Āµä¤ÕÖ©Õ£?-10 kPańÜäÕÄŗÕ╝▐ZĖŗńÜäńøĖÕ»╣ńöĄŗ╣?ÕÄŗÕ╝║µø▓ń║┐ŃĆéÕÄŗÕŖøõ╝Āµä¤ÕÖ©Õ£©õĮÄÕÄŗõĖŗÕģõh£ēķ½śĶŠŠ4.31 kPa-1ńÜäńüĄµĢÅÕ║”ŃĆéõĖĆõ║øÕģłÕēŹµŖźķüōńÜäÕÄŗÕŖøõ╝Āµä¤ÕÖ©õ╣¤Õģõh£ēŠcųM╝╝ńÜäķ½śńüē|ĢÅÕ║”’╝īńäČĶĆīÕ«āõ╗¼ńÜäńüē|ĢÅÕ║”ÕŠĆÕŠĆÕ£©ķ½śÕÄŗÕ╝║ÕQ?/span>>3 kPaÕQēõĖŗśqģķƤõĖŗķÖŹĶć│õĖŹĶā÷0.1 kPa-1ŃĆéõĖÄÕ«āõ╗¼ńøĖµ»öÕQ?/span>E-LMMREõ╝Āµä¤ÕÖ©Õ£©3 kPaµŚČńÜäńüē|ĢÅÕ║”õ╗ŹńäēÖ½śĶŠ?/span>2.28 kPa-1ŃĆ鵣żÕż?/span>E-LMMREõ╝Āµä¤ÕÖ©Ķ┐śÕģõh£ēµ×üķ½śńÜäÕÄŗÕ╝║ÕłåĶŠ©ńÄć(2 Pa)ÕÆīõĮÄŗéĆŗ╣ŗķÖÉ(2 Pa)ŃĆéĶ»źõ╝Āµä¤ÕÖ©õĖŹõ╗ģÕŻգ©ĶŠāÕ«ĮńÜäÕÄŗÕŖøŗéĆŗ╣ŗĶīāÕø┤ÕåģŠl┤µīüµ×üķ½śńÜäÕÄŗÕŖøńüĄµĢÅÕ║”ÕQīĶĆīõĖöÕłēÖĆĀµłÉµ£¼õĮÄÕŖĀÕĘźĮEŗÕ║ÅĮÄĆÕŹĢ’╝īÕÅ»õ╗źńö▒Õ£©3DµēōÕŹ░µ©ĪÕģĘõĖŁÕø║Õī¢ńÜäE-LMMREĶ¢äĶå£ĶĮ└LØŠŠläĶŻģĶĆīµłÉŃĆéÕøĀĶĆīÕģʵ£ēÕż¦Ķ¦äµ©ĪÕłēÖĆĀńÜäÕÅ»ĶĪīµĆ¦ÕÆīµø┤Õ╣┐ķśöńÜäńÜäÕ║öńö©ÕēŹµÖ»ŃĆ?/span>
õĖŁÕøĮ┐UæÕŁ”µŖƵ£»Õż¦ÕŁ”ÕŹÜÕŻ½ÕÉÄĶ┤ĀÕøĮķ£¢õžōĶ«║µ¢ćĮW¼õĖĆõĮ£ĶĆģ’╝īĶŗ▒ÕøĮõ╝»µśÄŠś░Õż¦ÕŁ”ÕöÉĶ»ŚµØ©ÕŹÜÕŻ½ÕQīµŠ│Õż¦Õł®õ║Üõ╝Źõ╝”ĶĄAÕż¦ÕŁ”µØÄÕŹ½ÕŹÄµĢֵij’╝īŠ¤ÄÕøĮÕīŚÕŹĪŠ|ŚĶÄ▒ŠUø_Ę×ń½ŗÕż¦ÕŁ?/span>Michael D. DickeyµĢֵijõĖ║Õģ▒ÕÉīķĆÜĶ«»õĮ£ĶĆģŃĆ?/span>
õĮ£ĶĆģń«Ćõ╗?/strong>

µ£¼µ¢ćĮW¼õĖĆõĮ£ĶĆģĶ┤ĀÕøĮķ£¢õ║?span style="font-family:;">2017“q┤µ»ĢõĖÜõ║ÄõĖŁÕøĮ┐UæÕŁ”µŖƵ£»Õż¦ÕŁ”’╝łUSTCÕQē’╝īĶÄ’LÉåÕŁ”ÕŁ”ÕŻ½ÕŁ”õĮŹŃĆéõ║Ä2021“q┤Õ£©µØÄÕŹ½ÕŹÄµĢֵijµīćÕ»ķgĖŗµ»ĢõĖÜõ║ĵŠ│Õż¦Õł®õ║Üõ╝Źõ╝”ĶĄAÕż¦ÕŁ”ÕQ?span style="font-family:;">UOWÕQē’╝īĶÄĘÕŹÜÕŻ½ÕŁ”õĮŹŃĆéńø«ÕēŹÕ£©õĖŁÕøĮ┐UæÕŁ”µŖƵ£»Õż¦ÕŁ”ÕĘźĮEŗń¦æÕŁ”ÕŁ”ķÖóńÜäõ╗┐ńö¤µ£║ÕÖ©õ║║Õ«×ķ¬īÕ«żõ╗šdŹÜÕŻ½ÕÉÄńĀöń®ČÕæś’╝īÕ»╝ÕĖłõĖ║Õ╝ĀõĖ¢µŁ”µĢֵijŃĆéÕģČńĀöń®Čµ¢╣ÕÉæõĖ╗Ķ”üÕīģµŗ¼µČ▓µĆüķćæÕ▒×’╝īÕÅ»µŗēõ╝ĖÕ»╝ńöĄÕżŹÕÉłµØɵ¢ÖÕÅŖÕģČÕ£©µ¤öµĆ¦õ╝Āµä¤ÕÖ©ÕÆīÕÅ»µŗēõÄūńöĄÕŁÉõ║¦ÕōüõĖŁńÜäÕ║öńö©ŃĆ?/span>
ńøĖÕģ│ķōŠµÄź
https://doi.org/10.1021/acsapm.1c01111