�ɹ����W�Ͳ�ʿ�D��W���̎��M�ɵ�һ���о��F��ѽ�����һ�Nȫ�µ����켼�g��(chu��ng)�����һ�N�߶��`��C�ӵ���ܛ�w�C���ˡ�
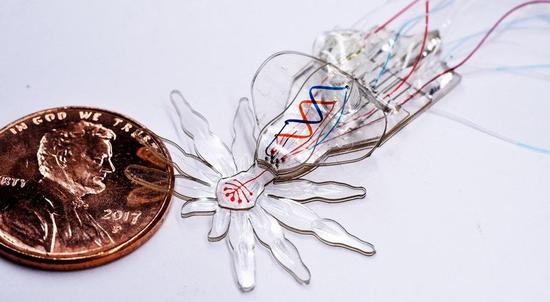
�@���^�̺��QMORPH(�≺/Һ���ؘ������w�ۯB)��������ܛӡˢ���g�����ù��z������C���˵����Σ�Ȼ��ʹ�ü��⾫���ӹ����g�ڙC���������g�̳���ͨ��������һЩͨ���S�����һ�ע���T�����ۯB���g�M���ܷ⣬��ʹ�Ø�֬�����⾀�M�����ϣ��Ķ��γ���K�ęC�������w��
ܛ�w�C���˵��������wͨ����Ȼ̎���_�Š�B(t��i)����˙C���˵�֫�w�܉����ˮ���߾ƾ����Ӳ�ģ�M�Ĵ�������ȸ֩��ı��F���@��о��ѽ��l(f��)�����ˡ����M���ϡ��s־�ϡ�
�����W��˹�о����IJ�ʿ���о�������ʿ�D��W�F�θ����ڣ��о��ĺ�����Sheila Russo�Q������С��ܛ�w�C����ϵ�y(t��ng)��Ȼڅ���ںܺ��Σ�ͨ��ֻ��һ�ȵ����ɶȣ��@��ζ������ֻ�܉��M���ض��Π��׃�������ض���͵��\�ӡ���
Russo���ڷQ����ͨ�^�ں����N��ͬ�����켼�g�҂��аl(f��)����һ�N���͵Ļ�����켼�g�������@헼��g�҂�ֻʹ�ù����z�ʹ�����˾���18�����ɶȵ�ܛ�w�C��֩�롣���܉��ڽY����������ɫ�ʵȷ���l(f��)��׃������������ˮƽ��Ҳ���м�С����������
���о��ˆT�Q���@���о��ˆT�״����@ôС��Ҏ(gu��)ģ�τ�(chu��ng)��������@�N����ˮƽ��ܛ�w�C���ˡ��о��ˆT�J�飬�@��о��������ڵ�������g�W�������t(y��)�W���ã�����Ҳ���ԑ����ڿɴ������g��
��˹�о����Ą�(chu��ng)ʼ�˼����ܣ����﹤�̌W����Donald Ingber�Q�����@�NMORPH�����܉���о��ˆT���_ܛ�w�C�����о������I����������Щ��ه�ڸ�С�w�ͺ��`��C���˵��t(y��)�W���ã��@�N�C���ˌ��܉�һ�Nȫ�µăȸQ�R�z����@������g����
- ���B���´�W�����x���ڡ��u���ø����ڈF� Small��һ�N���ڙCе��B(t��i)�O(ji��n)�y���������ӌ�늺��d-���z��Ħ���ʽ��ӂ����� 2024-03-25
- �п�Ժ�������MԺ���Ѹ�����־����Small������Ч�����������Բ��ϵ��OӋ 2022-12-01
- �{����Դ��������Ժʿ�ͅ��ΎF�о��T�F� Adv. Mater.���_�ŭh(hu��n)���µ��|�X����ϵ�y(t��ng) - �~�θ�Ч�IJ��ϱ��R 2022-05-18
- �ϼ��ݴ�W�w�����Fꠡ�Sci. Adv.��: �������S�ۼ��Ŀ����쑪׃������ 2023-08-26
- ������W�ξð��Fꠡ�ACS AMI���������Գ��m(x��)�������ԙC����ϵ�y(t��ng) 2022-05-17
- �V�ݴ�W���i��NCL�x�Sε ACS Sustain. Chem. Eng.������ˮ���z����ȫ���ۻ�����늳غ��Թ�����Ԃ��в��� 2022-05-17
