���������������(q��)��(d��ng)���ܵ����^����P(gu��n)ע�������Ԍ���ȼ��l(f��)�Ļ��W(xu��)���D(zhu��n)����C(j��)е�ܣ���K�ʬF(xi��n)�������(q��)��(d��ng)���ĺ��^�C(j��)е��׃����(du��)�ڝ���(q��)��(d��ng)�����f�������P(gu��n)�I�������ò��ϻ�Y(ji��)��(g��u)�ęC(j��)е���ܲ�ƥ���ԁ�������P(gu��n)�����܄�(d��ng)����ָ��ʝ���(q��)��(d��ng)�����O(sh��)Ӌ(j��)�P(gu��n)�I���ڽY(ji��)�ϲ����c�Y(ji��)��(g��u)�����ԡ��C�όW(xu��)�߂���(du��)����(q��)��(d��ng)�����о������Ƃ��O(sh��)Ӌ(j��)�^���У���Ҋ�ĝ���(q��)��(d��ng)�����O(sh��)Ӌ(j��)ԭ���ɴ��¸���������һ������ò���֮�g�Hˮ�����IJ�팍(sh��)�F(xi��n)�����D(zhu��n)�Q��׃�Σ���Ҋ�ĽY(ji��)��(g��u)��Janus�Y(ji��)��(g��u)�������νY(ji��)��(g��u)���@һ���(q��)��(d��ng)���������_���(q��)��(d��ng)�C(j��)���Ϳɿص���׃�����ڴ�Ƕ���׃���\(y��n)��(d��ng)�ϣ����д���ߡ��ڶ�����P(gu��n)����ͬ���ϵď�(f��)�ϽY(ji��)��(g��u)������Ҫ���ýY(ji��)��(g��u)�ϵIJ�팍(sh��)�F(xi��n)����(q��)��(d��ng)푑�(y��ng)���M(j��n)���D(zhu��n)�������W(xu��)��׃�����m�ڽǶ���׃������Ѓ�(y��u)��(sh��)����������Ҫ�����r(sh��)�gȥ��ɡ������ͨ�^�����IJ����x��ͿƌW(xu��)�ĽY(ji��)��(g��u)�O(sh��)Ӌ(j��)�Ƃ���C���(q��)��(d��ng)���ܸ��郞(y��u)���ĝ���(q��)��(d��ng)����Ŀǰ�����Q�Ć��}��
ᘌ�(du��)�������}������������W(xu��)�˄P���ڈF(tu��n)�(du��)���㽭��W(xu��)���������ڈF(tu��n)�(du��)����Ȼ��ģ�W(xu��)��(x��)���ܵ���Ȼ��ܛ�w���Є�(d��ng)����ΑB(t��i)���\(y��n)��(d��ng)��ʽ�Ć��l(f��)��ͻ����������Ҋ���O(sh��)Ӌ(j��)����Y(ji��)�����W(xu��)ģ�M�ȶ��W(xu��)�ƽǶȣ��Ƃ��һ�N���������ݶȽY(ji��)��(g��u)�Ćμ�GOĤ����(q��)��(d��ng)������(sh��)�F(xi��n)��푑�(y��ng)�Ƕȴ�푑�(y��ng)���ʿ죬�(q��)��(d��ng)�О���棬ѭ�h(hu��n)�؏�(f��)�Ժõă�(y��u)���(q��)��(d��ng)���ܡ�
���������Y(ji��)��(g��u)
�о��l(f��)�F(xi��n)����Ȼ���У��o��ܛ�w���Є�(d��ng)����\(y��n)��(d��ng)��ʽ�c�����w�Y(ji��)��(g��u)�������е�(li��n)ϵ����ëë�x�ķֶνY(ji��)��(g��u)����(j��ng)���l(f��)����������ģ�巨�O(sh��)Ӌ(j��)�����������Y(ji��)��(g��u)��GOĤ����D1���ɿ���GOĤ�о����������е����ɼ����܅^(q��)����Ƭ���g���������@��Ҵ���һ���ݶȡ�
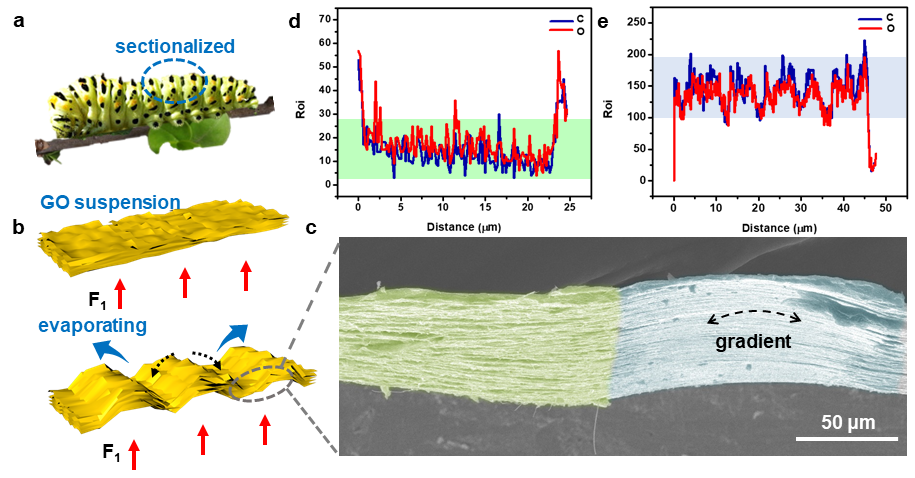
�D1 ��a-b�����������ݶ��Y(ji��)��(g��u)GOĤ���Ƃ�C(j��)�ƣ���c�����ڷֶνY(ji��)��(g��u)GOĤ��SEM����D����d-e�����Ʌ^(q��)�����܅^(q��)���EDX������
����(q��)��(d��ng)����
����(q��)��(d��ng)�����ǝ���(q��)��(d��ng)�����P(gu��n)�I���������Ķ������������ߌ�(du��)푑�(y��ng)�����ǣ��� �㣩�M(j��n)���Զ��x����D2�����M(j��n)�Ќ�(du��)����GOĤ�M(j��n)�С�����(q��)��(d��ng)푑�(y��ng)��׃��푑�(y��ng)���ʡ�ѭ�h(hu��n)�ԡ��(q��)��(d��ng)���ܜy(c��)ԇ���Y(ji��)������GOĤ���ڶ̕r(sh��)�g��(n��i)�_(d��)���s1000 ��ď�����׃���ҽ�(j��ng)�^���ߝ��-�͝�ȡ����ѭ�h(hu��n)�y(c��)ԇ�Ա��ַ�(w��n)����푑�(y��ng)�Ƕȣ���ͬ��������ʯīϩ������(q��)��(d��ng)�����ߝ���·���GOĤ���(q��)��(d��ng)���ʼ���׃�Ƕȸ��߃�(y��u)��(sh��)��
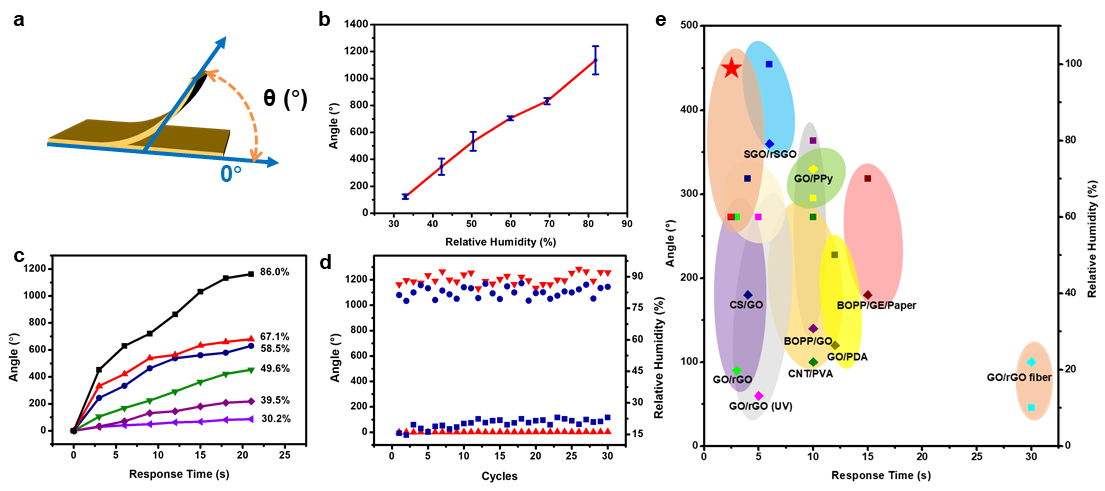
�D2 ��a��푑�(y��ng)�Ƕ�ʾ��D����b���ڲ�ͬ������(du��)��ȣ�RH��������׃�ǶȈD����c����һϵ������(du��)�����푑�(y��ng)�r(sh��)�g��������׃�Ƕȣ���d���ߵ͝��������׃�؏�(f��)�Ԍ�(sh��)�(y��n)����e���(q��)��(d��ng)���ʼ���׃�ǶȌ�(du��)�ȈD��
���W(xu��)�ƽǶ��(q��)��(d��ng)�C(j��)��̽��
���˶����ؽ�ʾ����GOĤ�ĝ���(q��)��(d��ng)�C(j��)�������Ļ��ڙC(j��)еԭ��������һ��(g��)���W(xu��)ģ�ͣ���������Ԫ�����M(j��n)��ģ�M�������������˽��(q��)��(d��ng)�О��ڎνY(ji��)��(g��u)����ȼ����W(xu��)��׃�g���P(gu��n)ϵ������������Ԇ�(g��)�������ڽY(ji��)��(g��u)����������(du��)��ȵ��������S�����ˮ�����M(j��n)��GOƬ���g�Ŀ�϶���g���Ķ���(d��o)��GOĤ�ر�Ĥ�ęM������Û��������Û���cGOƬ��֮�g�ČӾ��x�ɷ��ȡ���ˣ���(d��ng)������ӕr(sh��)��GO��Ĥ�У����ܶε���Û���������ɲ��ֵ���Û�����@�N��Û���IJ���(q��)��(d��ng)�Ą�(d��ng)��Դ��ͬ�r(sh��)�ڽo���ķ�֮һ��Ԫ�У������@�ɂ�(g��)����Č��g���x��ͬ��������ͬ�O�ǵ����±������Û���Dz�ͬ�ģ����J(r��n)������׃����ěQ�������ء���D3��ʾ���Y(ji��)��������ģ�M�����õ�����׃Ч���c��(sh��)�Hӛ䛽Y(ji��)���кܺõ��Ǻ��ԣ�����f������������(q��)��(d��ng)�C(j��)�������������W(xu��)ģ�͵ĿƌW(xu��)�ԡ�
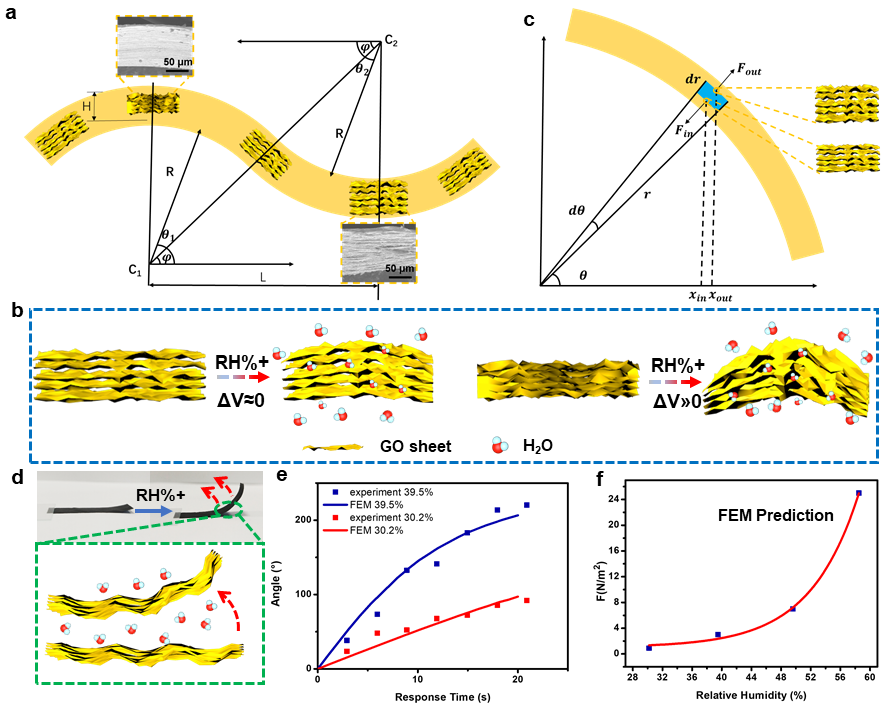
�D3 ��a��GOĤ�(q��)��(d��ng)���ęC(j��)еģ�ͣ���b���Y(ji��)��(g��u)���(q��)��(d��ng)�C(j��)��ʾ��D����c���ֲ�GOĤ����������ʾ��D����d�����^���^��׃ʾ��D����e-f������Ԫģ�M����Y(ji��)������(sh��)�(y��n)�Y(ji��)����
�(q��)��(d��ng)��(y��ng)��
��(y��u)�����(q��)��(d��ng)���ܼ���(d��)�صĽY(ji��)��(g��u)�O(sh��)Ӌ(j��)�x�����GOĤ�V韵đ�(y��ng)�ÿ��g�����߸���(j��)�����ݶ�GO��Ĥ�����ԣ��ɹ��Ƃ��������ëë�x�����\(y��n)��(d��ng)�����������b�ã��D4������ѭ�h(hu��n)����(q��)��(d��ng)�£����ڎ����g����ͬ�ļ�݆ӡӛ�ļ��������Ƅ�(d��ng)����(sh��)�F(xi��n)�����������b�õĿɿؿ��O(sh��)Ӌ(j��)��

�D4 �������ܲ����O(sh��)���ڼ�݆�����ϵ��\(y��n)��(d��ng)��Ƭ����on���͡�off���քe��ʾ���Ӻ͜p������(du��)��ȡ�
�Y(ji��)�Ϸ���GOĤ�ĽY(ji��)��(g��u)��֪�����������Ե��^�Y(ji��)��(g��u)�Ĵ��ڣ�����GOĤ����(q��)��(d��ng)�����и����ԣ���ˣ�����(j��)ԓ�N���Բ��Y(ji��)����Ȼ��ֲ������ΑB(t��i)�Ć��l(f��)�����ߌ�(du��)GOĤ�����c�Y(ji��)��(g��u)���з����0 �㡢45 �㡢90 ��ķ����M(j��n)�вü����Ԍ�(sh��)�F(xi��n)�����ΑB(t��i)�Ŀ��ƣ��D5��������ɾ���ʽ���ܝ���(q��)��(d��ng)�ṩ�ˏV韵�˼·���l(f��)չ���g��

�D5 0 �㡢45 �㡢90 ����и�Ƕ��£�GOĤ�ķ��������ԏ�����׃��
ԓ�о��ɹ��ԡ�Bio-inspired high sensitivity of moisture-mechanical GO films with period-gradient structures�����}���l(f��)����ACS Applied Materials & Interfaces��DOI: 10.1021/acsami.0c07956����Փ�ĵĵ�һ���ߞ鱱��������W(xu��)�Tʿ�о�������R���㽭��W(xu��)�Tʿ�о���������ͨӍ���ߞ鱱��������W(xu��)�˄P�������㽭��W(xu��)������������
ԭ��朽ӣ�https://pubs.acs.org/doi/pdf/10.1021/acsami.0c07956
- ���o���P(gu��n)��
�\���P(gu��n)ע�߷��ӿƼ�

- ����(b��o)���C(j��)��(hu��)��500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ�(hu��)�h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��(hu��)
- �Ј�(ch��ng)��300�|��PMEC China ɫ...
- ����ע��(c��)��2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �����ϸ��Լ��ӹ����g(sh��)Ҫ�I(l��ng)��...
- �Ї��ƴ���Ƙ�/���������...
- �B�T��W(xu��)������ڈF(tu��n)�(du��) AFM��...
- �Ľ�ƽ�����A�ƴ�F(tu��n)�(du��)ţȽ��...
- ̫ԭ������W(xu��)�����ֽ��� Adv...
- ����κ�ܽ��ڈF(tu��n)�(du��) CEJ������...
- �Ϸ��Ƽ���W(xu��)�����w���ڈF(tu��n)�(du��)...
- ���ϴ�W(xu��)������/����Ⱥ/����...
- ̫ԭ������W(xu��)�~���/��ʯ��...
- ���_������W(xu��)/�����ش�W(xu��) CR...
- ��h��W(xu��)ꐳ������߶���/��...
- ��ƴ��R��l(f��)�݈F(tu��n)�(du��) AFM��...