���˽�Q�������}���п�Ժ�K�ݼ{���������ĈF������һ�N������؞����̼�{�ܣ�CNT���w�S�����늻��W���������w�S���(q��)������푑�������

�D 1. 늻��W�(q��)�Ӹ���؞���˹����⼆�����(q��)�әC��ʾ��D
�c��ǰ���������CNT�������ⲻͬ���ı��浽���ģ���������u�pС����������ʹ�ڼ����������ĸ������M�ɼ�����CNT�w�S�Ա��ָ�����(�D1b)���@�_���������w���ɮa(ch��n)����Ч���(q��)�ӡ����⣬�ڸ����ȵ����������Ќ��F(xi��n)���༉�Y�����༉���Y�����M���x����Ƕ���Ó��(�D1a,c,d)�����ߵąf(xi��)ͬ���ã���ͬ���늻��W�(q��)�Ӽ���������(q��)�����ܡ�

�D 2. a. �˹����⼆�����(q��)�����c늉�֮�g���Pϵ��b. 4�ɶ༉����������(q��)�����c늉�֮�g���Pϵ��c. �˹������w�S���(q��)�����cע��늺�֮�g���Pϵ��d. ѭ�h(hu��n)��(w��n)����
����늻��W��ʽ�(q��)�ӕr���������a(ch��n)��������տs�(q��)����3 V�(q��)��늉����(q��)������60%����ͬ�r�ڶ̕r�g��(n��i)�e������������h��(y��u)���īIֵ���ɷN��͵ļ��������늺�ע�����c�����տs֮�g���Pϵ���D2c������������ͬ��ע��늺����£����ɸ���؞����������a(ch��n)���������տs�������ں���������ߵöࡣ�@�����Ĺɸ���؞�����������ĽY���ɸ�����Ч�،��x��Ƕ��������w�e׃���D(zhu��n)������s�(q��)�ӡ����⣬�տs�(q��)�����cʩ��늉��ʾ������P(�D2a,b)����ͨ�^ʩ��늉����˹����⼆���M�о��_�Ϳɾ��̿��ơ���������߀�@ʾ���L�ڷ�(w��n)���ԣ���ѭ�h(hu��n)4500Ȧ���(q��)�ӱ������Դ���97%(�D2d)��
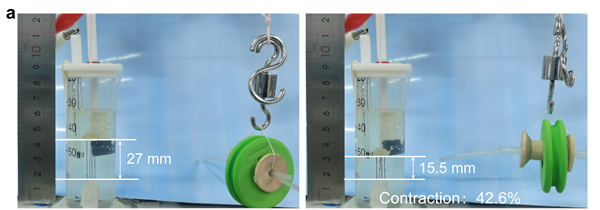
�D 3. �Ĺɼ����˹����⼆��
ԓ�F��Mһ���C���˶���˹������w�S�����Ŀ����ԣ���ɼ��������������������ݔ�������������ص���������(q��)�����]�����@���½����D3�������˴��M�˹����⼆���Č��H���ã�ԓ�F�ͨ�^��̼�{���w�S����ԭλ�o늼��zһ��������ľ۱�ϩ��{���w�S�����Ĥ��늽��|(zh��)�ӣ��ɹ��Ƃ���ȫ�̑B(t��i)�������⡣ԓȫ�̑B(t��i)�˹�������ڿ՚��з�(w��n)�����(q��)�ӣ��(q��)������Ȼ�_��18%��
���(q��)��늉����ɾ����տs�(q��)���Լ����(q��)����ݔ���ɴ���،�����˹������w�S�đ��÷��������⣬�@�N���ж���ĸ����ȽY���OӋͬ�����m���Ƃ��������(q��)�������(q��)�ӵ����ͼ������⡣
ԓ�о��ɹ���High-Twist-Pervaded Electrochemical Yarn Muscles with Ultralarge and Fast Contractile Actuations���}�l(f��)����Materials Horizons�ϡ�Փ�ĵ�һ�������п�Ժ�K�ݼ{������ʿ������ɏ��ͨӍ���ߞ�ۡ�����о��T���������о��T��ԓ�����õ��ˇ�����Ȼ�ƌW����21975281�� 21773293��21603264�����������c�аl(f��)Ӌ����2016YFA0203301���ȿ����Ŀ��֧�֡�
ԭ��朽ӣ�https://pubs.rsc.org/en/content/articlelanding/2020/MH/D0MH01352H#!divAbstract
- ��۳��д�W�����n�}�M CEJ��ֲ��l(f��)�ݶȿך����z - ���F(xi��n)�������l(f��)�еĿ���ˮ��ݔ�c�����l(f��)�� 2025-07-10
- �B�T��W�܌W������ Macromolecules���ߏ���𤳬���w�ӑB(t��i)�߷��ӾW(w��ng)�j�ķ����OӋ����߶���׃��Փģ�M���� 2025-07-03
- ̫ԭ������W�����ֽ��� Adv. Sci.: ������z�x�ܷ�����ģ�ԱO(ji��n)��ָ�����w 2025-07-02
- �Ĵ���W�~�ֽ��ڈF� Small�����з�(w��n)�����О�����;ۼ�ȩ�w�S���˹�����Ę��� 2025-06-26
- ���_���������n�}�M����2026����W����Tʿ��ֱ������ - ���όW�����W���߷��ӡ�����W�������c�w�S��Ӌ��ģ�M�������Ϣ... 2025-06-13
- �V�|���I(y��)��W��W�����/��|�긱���� Small: ����ľ�|(zh��)���^�Y���{(di��o)�ؘ���ȫ�����|(zh��)�����Ѽy���ޏ��˹����� 2025-04-18
