Һ�������w(LCE)���п����(q��)��(d��ng)�О飬��չ�˹����O(sh��)��Ĺ��ܿ��O(sh��)Ӌ(j��)�ԣ��m�����S����(y��ng)�ã������t(y��)���������ռ���ܛ�C(j��)���˵ȡ�LCE �(q��)��(d��ng)���țQ�l������Һ����Ԫ����,����ͨ�^�C(j��)е���졢�����^�������(ch��ng)�T��(d��o)ȡ��팍(sh��)�F(xi��n)��Ȼ�����������\(y��n)��(d��ng)��(f��)�s����ه�ڲ��`��^������Һ����Ԫ���м��g(sh��)����ˣ�����Ƃ�ȡ�����̺�(ji��n)�Ρ��Π��(f��)�s�ȸߵ�Һ�������w��Ҫ�M(j��n)һ���о���
ԓ�F(tu��n)�(du��)��ȡ��һ�N��(sh��)�ֹ�̻�����������������LCE���oģ�壩�����M(j��n)�Џ�(f��)�s���(q��)��(d��ng)�О���O(sh��)Ӌ(j��)��ԓ������������ͶӰ�x�M(j��n)�Д�(sh��)�ֹ�̻�̎�����D1b��,�����غ�ȷ���Ĺ�˥�p�F(xi��n)���γ��ݶȹ̻������������ߵĽ�(li��n)�ܶȺ���͵�δ����(y��ng)���w����������t�෴����(d��ng)δ����(y��ng)�Ć��w�]�l(f��)�r(sh��)������(g��)��ȷ���ą^(q��)�e��Ó���̶�ʹ�ù̻����ƽ��Ĥ�D(zhu��n)�������S���Π�D1c���g�������ġ���������ͬ�r(sh��)��Һ����Ԫ�l(f��)�M(j��n)��ȡ����K�õ����Џ�(f��)�s���S�Y(ji��)��(g��u)��ȡ���Һ�������w���^���܉�a(ch��n)������ď���׃�Ρ�
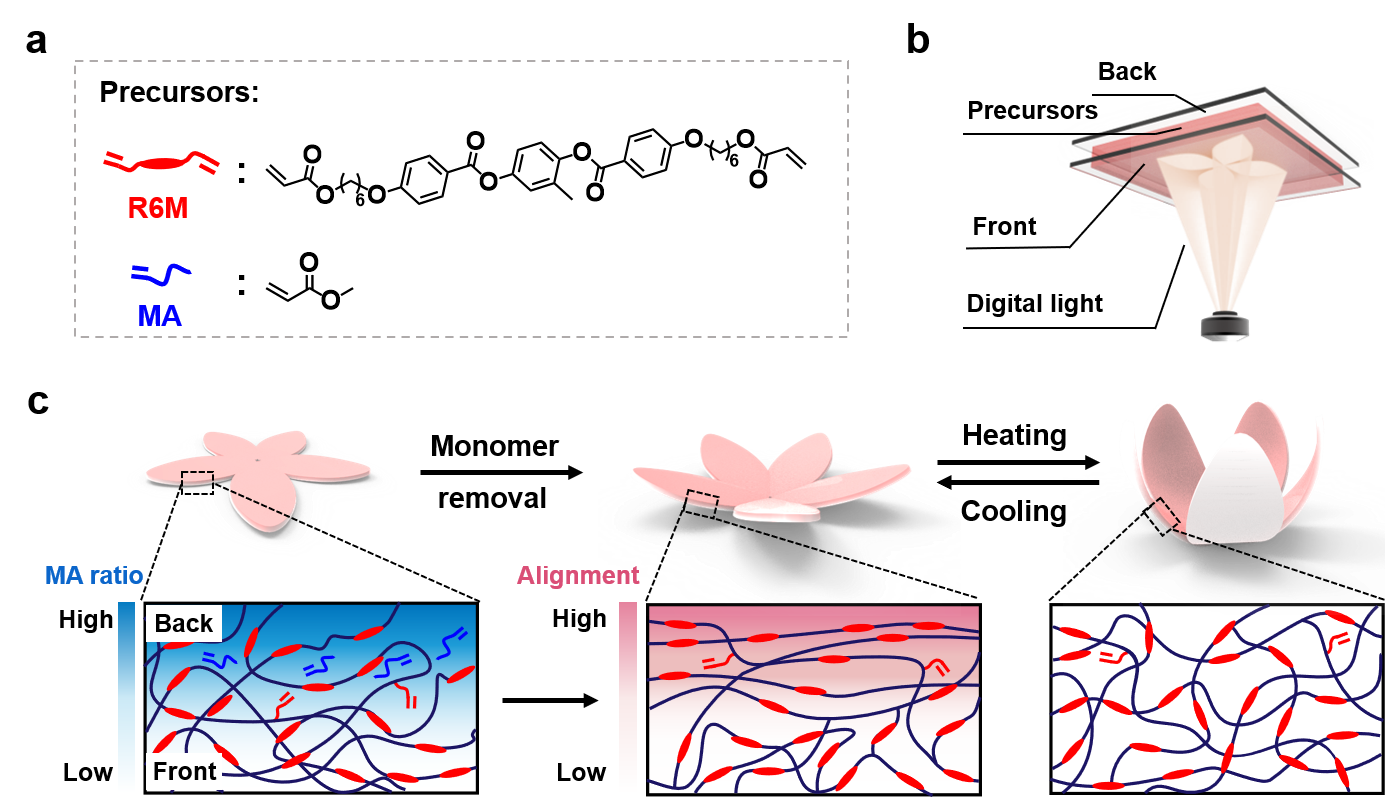
�D1 Һ�������w�Ĕ�(sh��)�ֻ��Ƃ� (a) ǰ�(q��)�w���w���W(xu��)�Y(ji��)��(g��u)��(b) ��(sh��)�ֹ�̻�ʾ��D��(c) Һ����Ԫ���кͿ����(q��)��(d��ng)�ęC(j��)��D��
�����O(sh��)Ӌ(j��)����(w��n)���Ŀ�����׃�О飬���Ô�(sh��)�ֹ�̻��ĕr(sh��)�Յ���(sh��)�ɿص�������ͬһ��Ʒ�Џ�(f��)�σɂ�(g��)�ع�r(sh��)�g�ķ�����(sh��)�F(xi��n)�˻��A(ch��)ģ�K�Ę�(g��u)����
���b������\(y��n)��(d��ng)ԭ������ͨ�^����(g��)�������ĺ�(ji��n)���տs/�U(ku��)���ąf(xi��)ͬ���Á팍(sh��)�F(xi��n)��ͬ���\(y��n)��(d��ng)�ęC(j��)�������Ô�(sh��)�ֹ�������O(sh��)Ӌ(j��)�ɶ���(g��)ģ�K����(ji��n)�Ώ���׃�Σ��M�ɲ��f(xi��)ͬ���õ�LCEģ�K���ɣ��D2����

�D2 �O(sh��)Ӌ(j��)ģ�K���ɵ�LCE���D���еĜ\�{(l��n)ɫ�������{(l��n)ɫ���քe����9���16����ع�r(sh��)�g�����б����߾���10 mm��
��ˣ��܉��ڲ�ʹ���κ�����ģ�����r�£��� 25 s��̻��r(sh��)�g��(n��i)������������и߶ȿ��O(sh��)Ӌ(j��)�Ե� LCE���@���O(sh��)Ӌ(j��)���й��ܶ����Ե�ܛ�w�C(j��)�����ṩ��һ��(g��)�µķ���
�������P(gu��n)�ɹ��l(f��)����Advanced Materials��Adv. Mater. 2021, 2105597���ϡ�Փ�ĵĵ�һ���ߞ��㽭��W(xu��)�����W(xu��)Ժ�Tʿ������(m��ng)������ͬ��һ���ߞ��㽭��W(xu��)���պ���W(xu��)Ժ�Tʿ��������ͨӍ���ߞ��x���������Z�P�����c������ʿ��
Փ��朽ӣ�https://doi.org/10.1002/adma.202105597
- ���K��W(xu��)���ս����n�}�M AFM�����w�w���(q��)��(d��ng)������Һ�������w 2025-06-24
- �eϦ���၆��W(xu��)�����F(tu��n)�(du��) Adv. Mater.: �аl(f��)��ģʽ����׃ɫҺ�������w�� 2025-06-16
- ̹���״�W(xu��)����ˬ��ʿ Adv. Mater.: �o�����l(f��)�� - �u�IҺ�������w������(q��)��(d��ng)�����(q��)��(d��ng)�� 2025-05-31
- �Ͽƴ��N�x����蟡�Nat. Commun.�������ж�ģʽ���й��ܵ��x����݂����� 2023-08-11
- �m�ݻ��������R�A����͢÷/�m����������(qi��ng) CEJ���״Ό�(sh��)�F(xi��n)�p��A����������3/4D��ӡ 2021-12-24
- ������������W(xu��)�w�ǿɽ����c���������W(xu��)Ժ�R������AM�����Ԅ�(d��ng)�B(t��i)�߷��Ӳ��ό�(sh��)�F(xi��n)�h(yu��n)��ģ�K���ۺ��M�b�c��(f��)�s���S�Y(ji��)��(g��u)���ټӹ� 2021-06-21
- ���AΣ�r����/����ꐠ���(qi��ng)����/���A���r�����ڡ�Adv. Mater.�������l(f��)�L(zh��ng)���(q��)��(d��ng)���ď����w 2023-01-07
�\(ch��ng)���P(gu��n)ע�߷��ӿƼ�

- ����(b��o)���C(j��)��(hu��)��500+ˎ��...
- ��(gu��)�HƷ�ơ�ǰ�ؕ�(hu��)�h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ��(gu��)�a(ch��n)������٣����(gu��)���^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��(hu��)
- �Ј�(ch��ng)��300�|��PMEC China ɫ...
- ����ע��(c��)��2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �����ϸ��Լ��ӹ����g(sh��)Ҫ�I(l��ng)��...
- �Ї�(gu��)�ƴ���Ƙ�/���������...
- �B�T��W(xu��)������ڈF(tu��n)�(du��) AFM��...
- �Ľ�ƽ�����A�ƴ�F(tu��n)�(du��)ţȽ��...
- ̫ԭ������W(xu��)�����ֽ��� Adv...
- ����κ�ܽ��ڈF(tu��n)�(du��) CEJ������...
- �Ϸ��Ƽ���W(xu��)�����w���ڈF(tu��n)�(du��)...
- ���ϴ�W(xu��)������/����Ⱥ/����...
- ̫ԭ������W(xu��)�~���/��ʯ��...
- ���_������W(xu��)/�����ش�W(xu��) CR...
- ��h��W(xu��)ꐳ������߶���/��...
- ��ƴ��R��l(f��)�݈F(tu��n)�(du��) AFM��...