�t���C���ˌW�����ˎƷ�ί����o��ˎƷ�ί��ķ�ʽ�ѽ��ɞ������t�W�lչ��ǰ�،W�ơ����Б����^��V���ļ�֫�c�����o�������ѽ��鲿�ֲ�����ʿ�������|������һ���̶ȵĸ��ơ����F�е�Ӳ�|�t���C���ˣ���֫���������ĵȣ��������c������ʿֱ�ӽ������˙C�ӿڕr���ڰ�ȫ�ԣ����m�ԣ������Եȷ������кܴ�ľ������c�ˡ�
�����������ܛ�����c�Y������������c���������lչѸ�ͣ�������������ԣ������ԣ����m�ԣ��ͳɱ�������ʹ�����˙C�ӿ����棬���������P�t���C�����I�������V韵đ���ǰ���������������t���C�����I��đ�������������Ñ����m�ԣ�ʹ�ð�ȫ���Լ��������ܣ���չ�������c�����I������׃��һЩ���y�t���C�����I��İlչ�������������t�W�C���˵��_���lչ��
���ڣ����������WԺ�߂����ڈF���Advanced Materials �ϰl���}�顰Flexible Electronics and Devices as Human-Machine Interfaces for Medical Robotics�����Lƪ�C�������C�����ȏIJ����c�Y���U�����������ă��ݣ�Ȼ�������ڽ�ʮ������д����Ե������˙C�ӿ��о�����������֞����С������ӛ䛡���Ϣ̎���c��ݔ���ӡ��̼�������I���Լ����I��������ϵ�y����Ԕ�M�U���������c�������t���C���ˌW�I�����Լ�֫�c�����o���C���˞������İlչ�c���ã������������I��lչ�����R�������c���P���ڵ���Q������
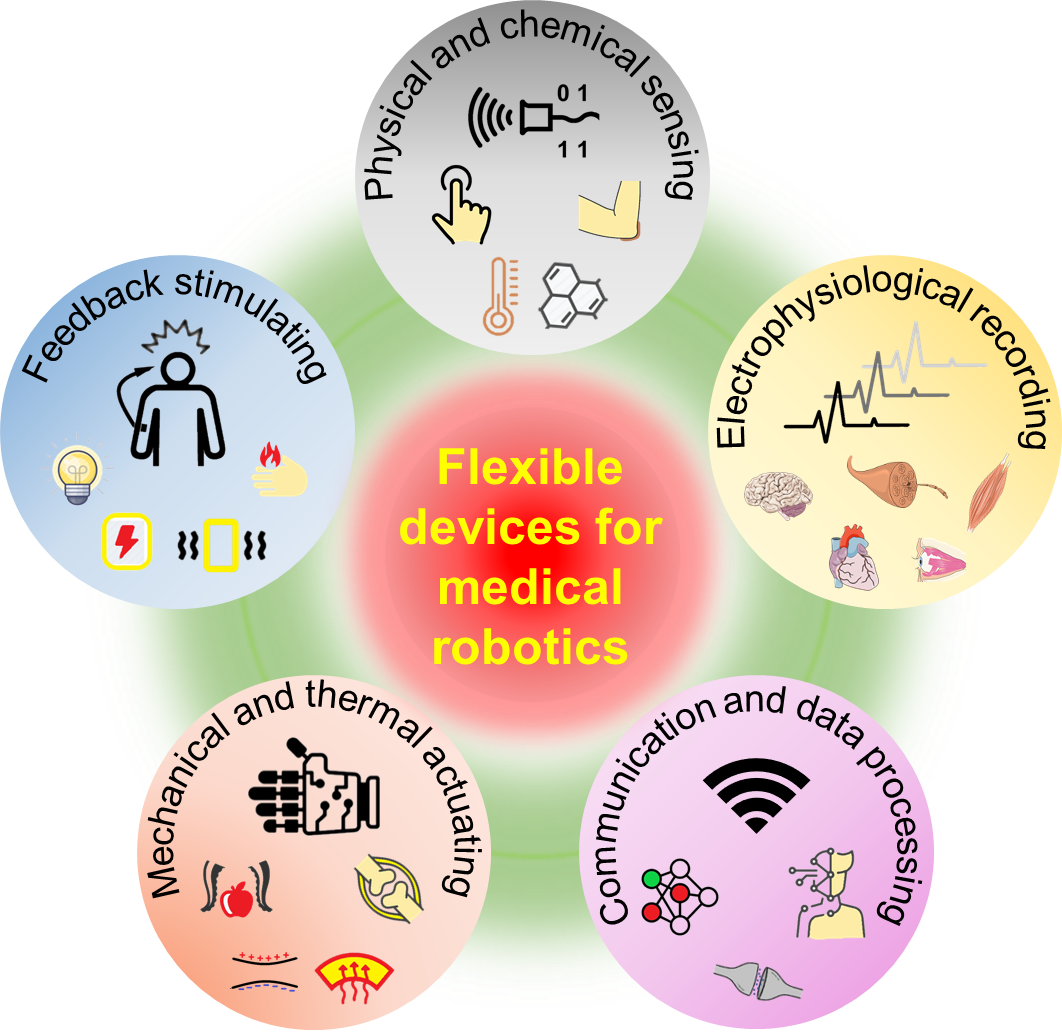
�D1. ����������������˙C�ӿ����t���C���ˌW�еĴ����ԑ��á�
�����c�Y�������������W�c������������������ԣ��������c���ܱ��F�����m���c�����Ե�����������P�����c�Y�����Y�����в���ᘌ���������׃����W�����W�Լ��������P�ﻯ��Ϣ���Ԃ�������ԭ���c���þC���c�uՓ�������ӛ䛲����������X늣���늣���늣���늣���늵���������ʽ�c����ʽ�������̖����������ʽ�c�����Ŀ�������Ϣ̎���c��ݔ�������w�˂�����̖��������̖���D�������P�˹���Ԫ�Լ��C���W���ڂ����c�Ӕ���̎���еĽ�ɫ���Ӳ�����Ҫ�����˻��ښ�ӣ����ӣ���늏����w��ܛ�w�C���˵ļ�֫�c�����O�䣬�Լ����ڽ���Ч���c�ɠ���Ч���ğ�W�������̼������U���˵��͵�늌W�����z���W��ֲ��ʽ�̼������Լ���Ƥ���W�����ӣ�늌W�ȿɴ���ʽ�̼�����ϵ�y���ɲ��������e�˾��д����Ե����Լ�֫ϵ�y�Լ���λӛ��c�̼�ƽ�_���^�c�cչ���������Y��������������������P���������ԣ����ܱ��F�����憖�}���˹����ܣ���Դ�������ӹ����죬�Լ�ϵ�y���ɵ�һЩ���c���}�Լ����ڵĽ�Q������
ԭ��朽ӣ�https://doi.org/10.1002/adma.202107902
- �A�ƴ�Ǻ��� Sci. Adv.�����؏�ʹ���������ϵ�y�����t�������O�y 2025-06-26
- ���_���������n�}�M����2026����W����Tʿ��ֱ������ - ���όW�����W���߷��ӡ�����W�������c�w�S��Ӌ��ģ�M�������Ϣ... 2025-06-13
- ���_��W���������n�}�M���ղ�ʿ����2025����W�������Y��ʿ��� - ���όW�����W���߷��ӡ�����������W�������c�w�S�����١�Ӌ��ģ�M�������Ϣ�� 2025-04-17
