��ͬ�ڂ��y(t��ng)�Ą��ԙC���ˣ�����������Բ��Ϙ�����ܛ�w��әC���ˣ���ʹ���и����`���ԡ����g�ԣ��c���w�ʹ�������Ʒ�����^���о��и��ߵİ�ȫ�ԣ���������ܿɴ����O�䡢�˙C�������ǽY�����h(hu��n)���c���s�ٿ�ϵ�y(t��ng)�о��ЏV韵đ���ǰ������Ŀǰ�ձ鑪���ښ������������Ĥ���ϴ��ڶ����׃�Ρ��Ǿ��ԏ��ԡ��H�w�Բ��Լ��Ƃ乤ˇ���s�Ȇ��}����������˚��ܛ�w�C���˵��w�e�ȹ��ʡ����ٶȡ��ɲٿ��ԡ��ɔUչ�Լ����ڿɴ����I��đ��á�



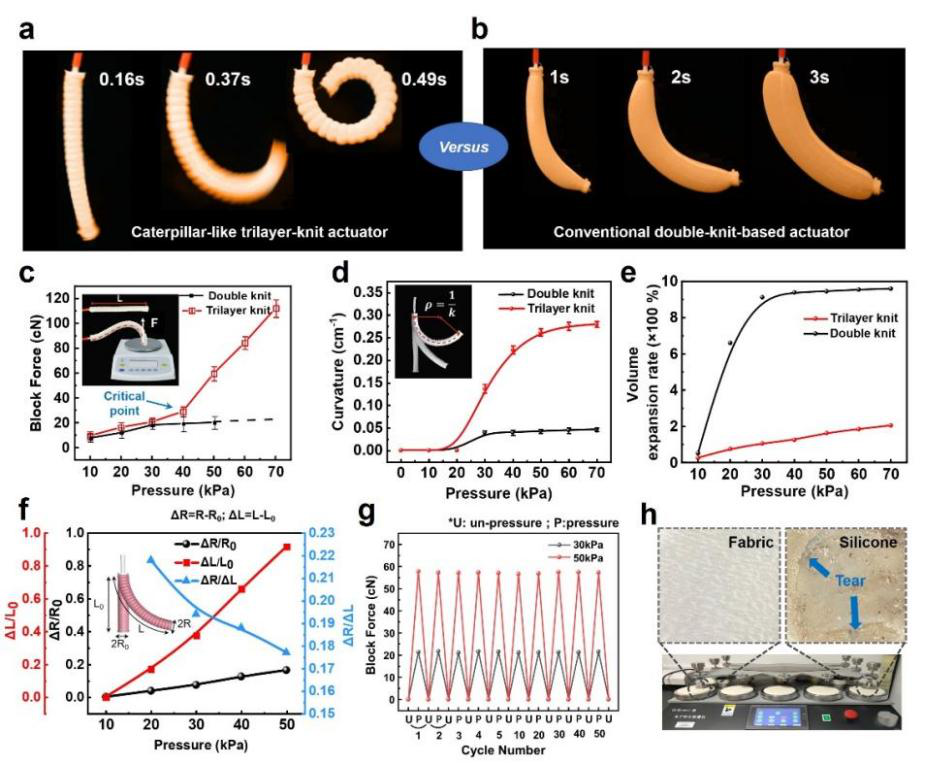

�D3�����ˊA���r�|ᘿ����������͂��y(t��ng)���p��ᘿ��������������ܡ��A���r�|ᘿ��������������^�õ�������ݔ��������׃�Σ���ݔ�����͏������ʾ��Ȃ��y(t��ng)�p��ᘿ��������߳��s6�������w�e��Û���ӕr�g�H����y(t��ng)ᘿ���������0.22��0.16�����������_�l(f��)������ͬ�r�߂��^�õď�����Ⱥ������������⣬�OӋ�������w�F���^�õ�ѭ�h(hu��n)��Ч���̓�(y��u)������ĥ���c���W�����ԡ�
�D4���������ڸ��M�������pģ����Փ������Ч�A�y�����ď���׃����r���M���U���΅��������W�������Ӱ��������\����ʽ��Ȼ��ɷ�����ܛ�w������׃�����ʺ��\���M�к��εľ����OӋ�����F���D���������������ȶ����\����ʽ���OӋ��ͨ�^��һ��Դ���Ƶ�혴�׃�ε�ܛ�wץȡ�C���ˣ������ˏ��s���B�ӽY���Ͷ�Դ��ӿ���ϵ�y(t��ng)��
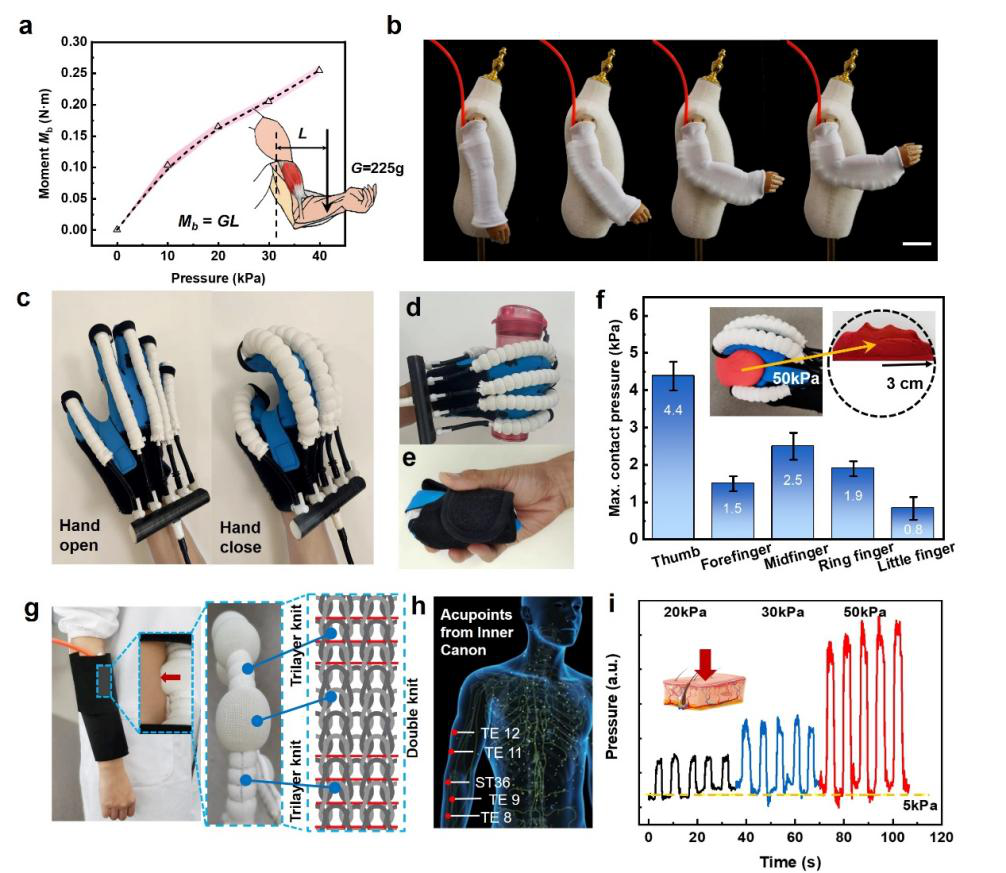
���OӋ�ĊA���r�|ᘿ�������������ܛ���H�w�����m�����ԣ��������o�����w֫�w�\�ӻ���ָ�\�ӵ��˹��������Դ��ͨ�^����ʩ����ጉ���ʹ������Û�����ͻ؏ͣ��Ķ����P��(ji��)����\�ӡ����⣬߀����ͨ�^��ͬ�����Y���ĽM���OӋ�����Fʩ���^���������IJ�ͬ��Û׃�Σ�����ᘌ����wѨλ�M�а�Ħ��������
ԓ�о����û�ʽ�����ΑB(t��i)�͊A���r�|ᘿ��Y���ķּ��OӋ�����F�˳������Ժ��pģ����ܛ�w��әC���˵����죬��չ�F�˸�Ч����׃�Σ�ͬ�r�˷���ܛ�w��������ܛ�Ժ�ݔ�����y�Լ�Ć��}�����⣬�@�N���ü����Y���_�l(f��)ܛ�w�����ķ��������ИO�õĿɔUչ�Ժ��OӋ�����ԣ����Ï��s�ij�Ĥ���g��ģ���OӋ������Ԍ��F�ͳɱ�����ߴ硢��ͬ�ΑB(t��i)�������\��ģʽ�Ě�������Ŀɾ����Ƃ䡣ԓ�о��ɞ���ڎ��c�Y���OӋ�˹����������ṩ�µ��_�l(f��)��ʽ���������M���ԽY����ܛ�w�����I����°l(f��)չ��
Փ��朽ӣ�https://doi.org/10.1002/adfm.202210351
���d��Bioinspired and Hierarchically Textile-Structured Soft Actuators for Healthcare Wearables
- ��ӿƴ��ϲ���ڈF�/��h�����_�������ڈF� Adv. Mater.: �������L�^�̆�ʾ�ĸ����������Lˮ���z 2025-03-19
- ��۳��д�W��ƽ���n�}�M��Mater. Horiz.�����ɾ��̹��������R�_�ԽM�b�Y�����ڶ�ģ�B(t��i)�\�� 2025-01-08
- �������������/����/�w�ΈFꠣ����и�����ͨ��������f���p���L���ӵĿ����オ�⌧�IPNԭλ������z���ڹ��������� 2024-11-24
- �A���r������p���ڡ�����x�����ڡ��콭�������� Adv. Sci.���p�W�j�x��ˮ���z���F�ɴ����������늴������c�Թ�늂���һ�w�� 2025-07-03
- �A��������ِ�A�����n�}�M CEJ������3D��ӡ���g�����Ŀɴ��������|�XĦ��늂������ڲ��ϸ�֪�I��đ��� 2025-05-29
- ���ڼ��g��Wʷ���|�� Carbon������ʯīϩ-�{���w�S�؏ͺϱ�Ĥ�����ޏ͑�׃/����pģ���������OӋ���ڿɴ��������O(ji��n)�y�đ��� 2025-05-28
- �B�T��W�܌W������ Macromolecules���ߏ���𤳬���w�ӑB(t��i)�߷��ӾW�j�ķ����OӋ����߶���׃��Փģ�M���� 2025-07-03
