������ճ���Y����ه���c�����g�ķ����A�����ã��Ɍ���ͬ���Ϻͱ���a�������ճ�������������\ݔ�Cе�ۡ������C���ˡ������NƬ���I��չ�F����đ��Ý������M���ڽY�������Ͳ���̽���ȷ���ȡ�����ش��Mչ����������ճ�����ϵ��m���Ժͷ����������R�ܴ��������ȣ��ڏ��s��ƽ�����挍�F���ν��|�dz����y��������һЩ���ИO����ò���������w(�����w����݆��ͻ׃�������)�����|��������đ������У����������Ѽy�Uչ������ճ�����ܡ����⣬��α���C���˲����г�Ҋ�����Ч����ճ����B��Ӱ����Ǿ��������Եģ��@�Q����ץȡ���\ݔ�����ķ����ԺͰ�ȫ�ԡ���鼴ʹ���p����ӣ�Ҳ��ʹijһ�^��Ľ��|��B�O�Ȳ�����������ѼyѸ�ٰl�������ӵ��L�U����ˣ���ߌ���Ҏ�t������m���ԣ�ͬ�r���ַ����Ŀ�����������Ƅӷ�����ճ���Y�����̑��õ��P�I֧�Ρ�
�ġ��߶�ģ�M��������߶ȷ�����


�D1 ��߶ȷ���ճ���Y���OӋ˼·
����ΑB�c�����и���������µ�ճ���C��
��߶ȷ���ճ���Y�����ڵ��͵ķ�ƽ������չ�F�����õ�ճ�����ܡ�����C���������в�ͬ���ʵăȰ�������棬��߶ȷ���ճ���Y����Ȃ��y��ճ���Y����������һ������������D2��ʾ������Ҫ���ǣ��@�N�����H�ڶ���ΑB�������и����ϕr�ſ����_�����μ��M�������и��߂���������ճ���Y������Ч���������@����ֵģ�M�Mһ���C�����@�N������ÙC���ǁ�Դ�ڿ�϶�������µĵ͏���ģ���������и�������Ѽy���@Ч�������Ѽy�Uչ���п�̎�������؆�������ģ���U���˽��|��eʹ�ø���������пڅ��c���У�����������Ѽy�ĔUչ�������˽����ճ������D3��ʾ�����⣬��϶�Ĵ���ʹ����������đ����ֲ������ҷֲ�����Ч�����ˑ������У�Ҳ��ճ���^�����˷e�O�����á������ڴˣ���߶ȷ���ճ���Y���������`����a������Ч���@�����oՓ�ǽǶ��`��߀���_�A�`���Ȃ��y��ճ���Y�������F����������������D4��ʾ��

�D2 ��߶ȷ���ճ���Y����ճ������

�D3 ��߶ȷ���ճ���Y����ճ�������C��
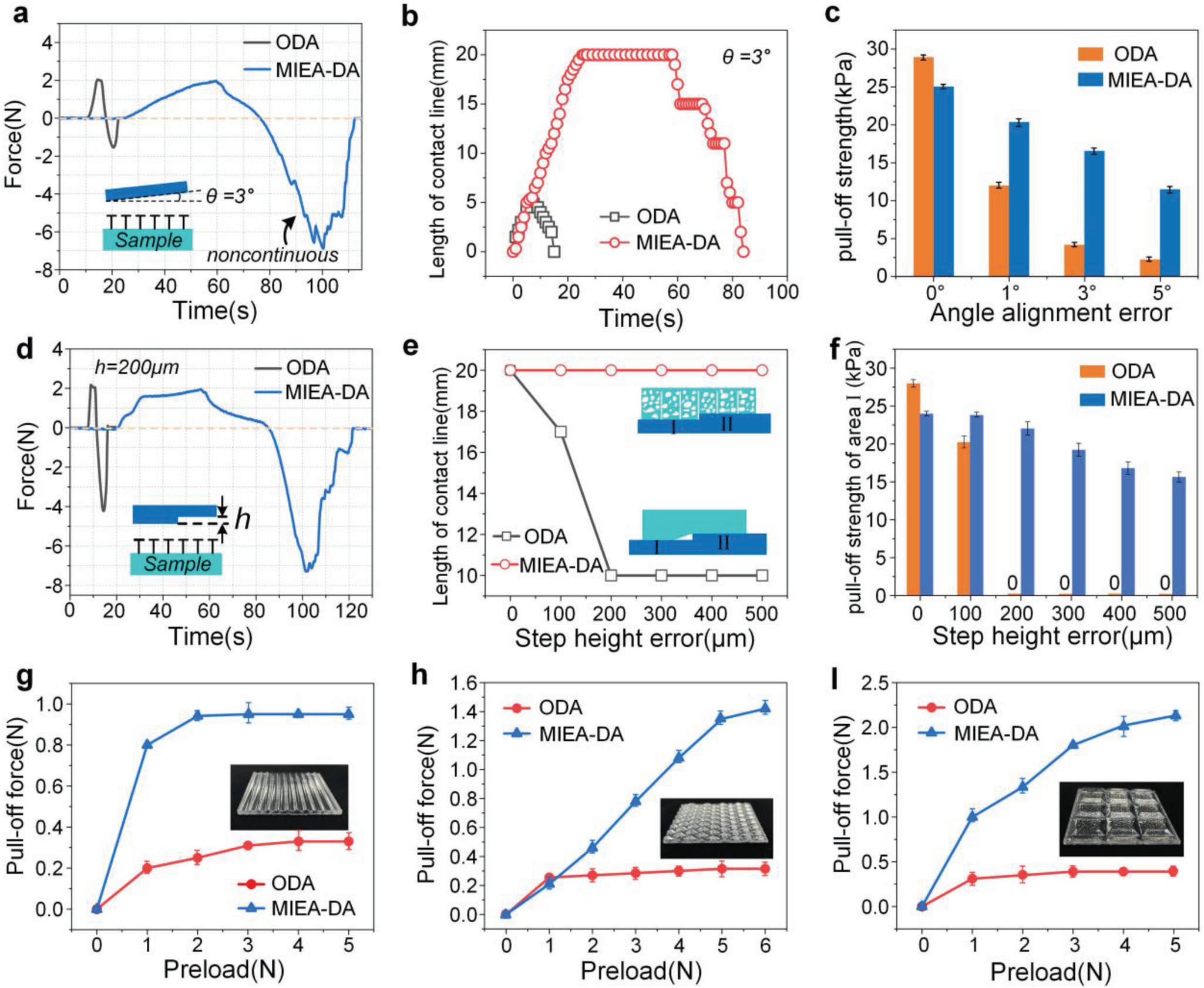
�D4 ��߶ȷ���ճ���Y�����`���a������
�Y�������OӋ����
ͨ�^̽���xɢ���̶ȡ��п���ȡ�플Ӻ�ȵȹ�ˇ������ճ�����ܵ�Ӱ푣�ԓ�о������˶�߶ȷ���ճ���Y���ă����OӋ�ʄt�����Y�����������ߵ��xɢ���̶Ⱥ�����п���ȿ��Ԏ������õ�ճ��Ч������D5��ʾ����Ȥ���ǣ�플Ӻ���cճ������֮�g�����Ǻ��εľ����Pϵ��������������B�ֲ����@���Ԛw����플ӱ�Ĥ�����W���ܺͽ���ճ�Y��B֮�g�ę�⡣플Ӻ���^�����ӿ������ȣ����ͽ�����m���ԡ�Ȼ������플Ӻ���^С�r�֕�������Ĥ�c�r��֮�g�ĽY�Ϗ��ȣ���Ȼ�����ڸߏ���ճ���������r�ӃȲ����w�Sֱ���s��100 ��m������Դ��ڴ�ֵ��플Ӻ���OӋ���H���ԝM��Y�Ϗ��ȵ�Ҫ���ҿ��Ԍ��F�������Ⱥ����g�Ե���ѽM�ϡ����⣬ԓ�о�߀�l�F��ͬ�Ŀ�϶�ʕ�Ӱ푶���r������ģ�����Ķ���׃ճ�����ܡ���϶��Խ�ߣ�����ģ���ı�ֵԽ��������ճ������Ҳ����ͻ����
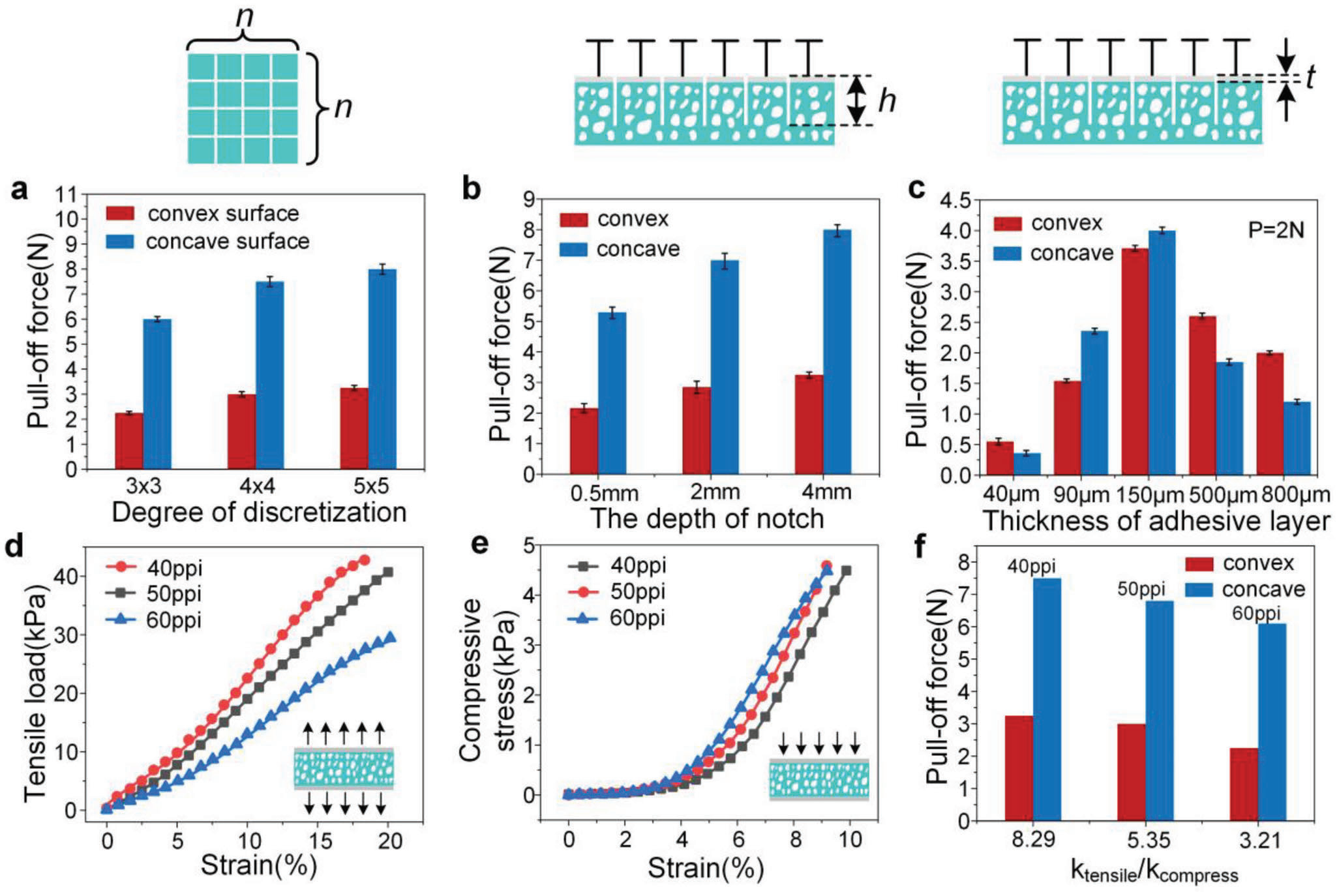
�D5 ��߶ȷ���ճ���Y���ă����OӋ
���m���Ը߷�����ץȡչʾ
���ڃ������m���Ժ��Ѽy�������ã��о��F�ᘌ��C���˲����еĎׂ������������߶ȷ���ճ���Y���M���ˑ�����C�������������w��������m����ץȡ����D6��ʾ������һ�N���͵ĘO�˱��棬���y��ճ���Y�����y���F���ν��|������߶ȷ���ճ���Y�������p�ɵ����ץȡ���w�����D����ijЩ�xɢ��Ԫ�ĵײ�������Ӱ�ʣ����xɢ��Ԫ�c���汣����Ч���|���O���،���ճ���Y�����T����m������h���µđ��÷��������⣬�о��F�߀���д����Ӝyԇƽ�_������߶ȷ���ճ���Y���Ŀ��������M������C����D7��ʾ�����y��ճ���Y������ӭh���µ�ճ����B�H�ܾS�֎��룬����߶ȷ���ճ���Y�����Ա����L�_һ�ְ�犡��@�����ڮ�ϵ�y�ܵ���Ӹɔ_�r����϶�������_���ã����ղ����������������۷e�����⣬�����пڵĴ��ڜp����ÿ��ճ����Ԫ֮�g�a���ĔD����Ħ���șCе����ã��Ķ����C���������|�^���ճ�������ԡ��@�N������������@���������������ճ���Y����Ŀ�����w�����еķ����ԺͰ�ȫ�ԡ�

�D6��߶ȷ���ճ���Y���w��ץȡչʾ

�D7��߶ȷ���ճ���Y������Ч��չʾ
ԭ��朽ӣ�https://doi.org/10.1002/advs.202302512
