�|����W���F��/�Ϸ��������ִ�W������ CEJ�����з������{�������Եİ뻥�����d���Ը�֪ˮ���z����
����һ�N���d�ķ������ϣ��̼�푑���ˮ���z�����`���푑������Ͷ��ӵ��{���ֶΣ�������ܵ��ˌW�߂��ďV���Pע��Ȼ�����F�A�λ��ڴ̼�푑���ˮ���z�Ƃ�Ľ^����������������H�܉F���̼�-��׃���Ć������{���^�̣��@�c�ЙC�����w���R�e-�Д�-���С��ĸ������О�߀���^���ࡣ���磬��Ȼ���е����������w����ͨ�^��ϵ�y�R�e���h����r���������ˑB���M���Q���Ƿ��M�����w�Ƅӣ��෴���F�������������Ĵ̼�푑���׃�^�̄tȱ�������R�����^�Дֻ࣬���ڟo�ɔ_�����댍�h������ɿɿص������΄գ��ڏ��s�h���е��m���Լ���������չ�F�����������д���ߡ����ˌ��F������w���R�e-�Д�-���С����������^�̣������������HҪ�߂��`��ɿص���������߀Ҫ�߂䌦��������׃�^���M�������R�e�����Ҹ�֪��������ˣ��lչ�����������֪���������������Ӳ��ϣ�ʹ�䲻�H�܉������h���̼��®a���ɿ���׃��߀�܉���̼�푑�����׃�^���M�������R�e�������F������w���R�e-�Д�-���С������ܷ����������Ƃ估���þ��о�����x��
���գ��|����W��WԺ���F�������ڡ��Ϸ��������c���ִ�W���������ں������_�l��һ�N���з������{�����ܵİ뻥�����d���Ը�֪ˮ���z������ԓ�����Ԝض��T������x�ۺϵķ����Ƃ��˺��d��ľ�N-��������ϩ������PNIPAM��ˮ���z�����Mһ����ˮ���z��ԭλ�����ۺό�늾ۺ���۱�����PANI������K�õ��뻥�����d��ˮ���z��Sponge-Like semi-Interpenetrating hydrogel, SL-s-IPN hydrogel��������PNIPAM�����ğ�푑��Ժ�PANI���õĹ���D����������ʩ�Ӳ�ͬ�Π���ȡ�������l�ʵĽ��t������ԓ�����Ƃ�������������܉����^�̵ĕr�g����ɏ������ۯB���⾀ۙ�ȶ�N���s������ֵ��ע����ǣ���늾ۺ��������ʹ���������ڰl��������׃�r�܉�a���əz�y�Č��r늌W��̖���M�����F�䌦������׃�����Ҹ�֪���������@�N��Ч��늌W�����C�ƣ����B�ӵ��ɱO�y��������ϵ�y�ȽM�ɵ��]�h����ϵ�y��Closed Loop Control System�� CLCS���к����������܉���Ч��ģ����Ȼ�������܄��������ϵ�y�����h���г��F�ɔ_���ؕr���ɔ_���ɔ_��������܉�Ѹ�ٵ،��h��׃����r�M�и�֪���Дಢ����������׃�M�������{����

�Dһ���뻥�����d���Ը�֪ˮ���z���Ƃ䡢������׃�^�̼��]�h���ƻ�·�Ę���
���c1�����d���^�Y���x��ˮ���z�����푑��ٶȺ����О�
���������Üض��T������x�ۺϵķ������Ƃ��˺��d��Ķ��PNIPAMˮ���z���c��Ҏ�����Ƃ��PNIPAMˮ���z��ȣ�ԓ�����Ƃ��PNIPAM���z���и���ıȱ���e����ͨ�ĿY�����䪚�ص��^�Y����ˮ���z�Ȳ�ˮ���ӵ��w���ṩ�˴���ͨ����һ���̶��Ͻ����˂��yPNIPAMˮ���z��LCST�����l����׃�rƤ�w��Ч������푑��ٶȵ�ؓ��Ӱ푡��yԇ�Y���@ʾ����ȥ��Û����Û���^���У����d��PNIPAMˮ���z��SL-PNIPAM���Ͱ뻥�����d��ˮ���z��SL-s-IPN�����܉���5s�Ⱥ�10s�ȷքe�_����Ûƽ�⣬�h���ڂ��yPNIPAMˮ���z��N-PNIPAM���_����Ûƽ��ĕr�g����ʮ����������ٷ�犣������⣬�ڽ��t���̼��£���SL-s-IPNˮ���z�Ƃ�Ĺ�-�����������܉���2s�ȏ��������Ƕȣ������t����P�]�������܉���1s�Ȼ֏͵���ʼ�Ƕȣ�չ�F���˘O����ɫ�Ŀ���푑��О顣
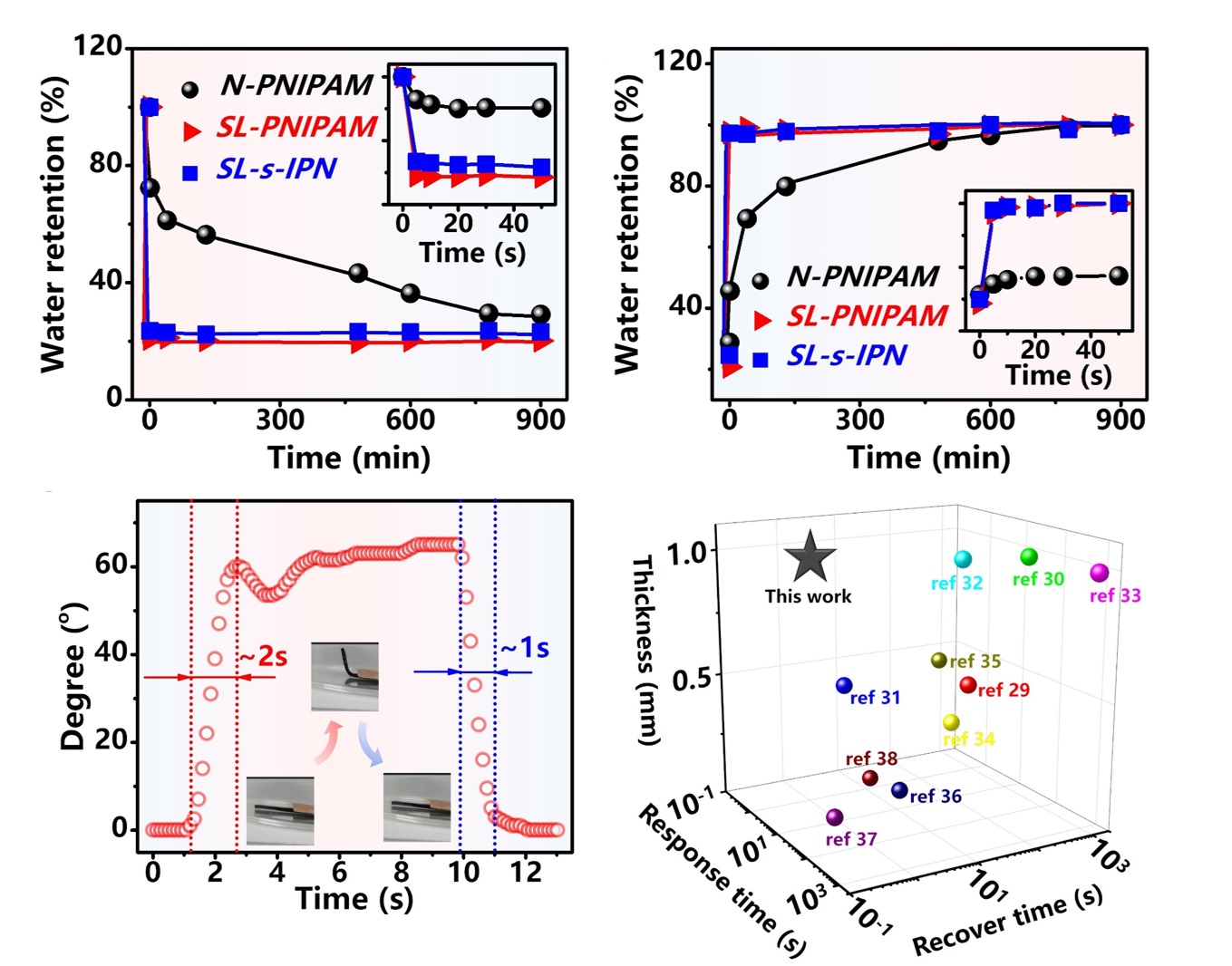
�D�����뻥�����d��ˮ���z����Û/��Û�����W�yԇ����������푑��ٶȜyԇ
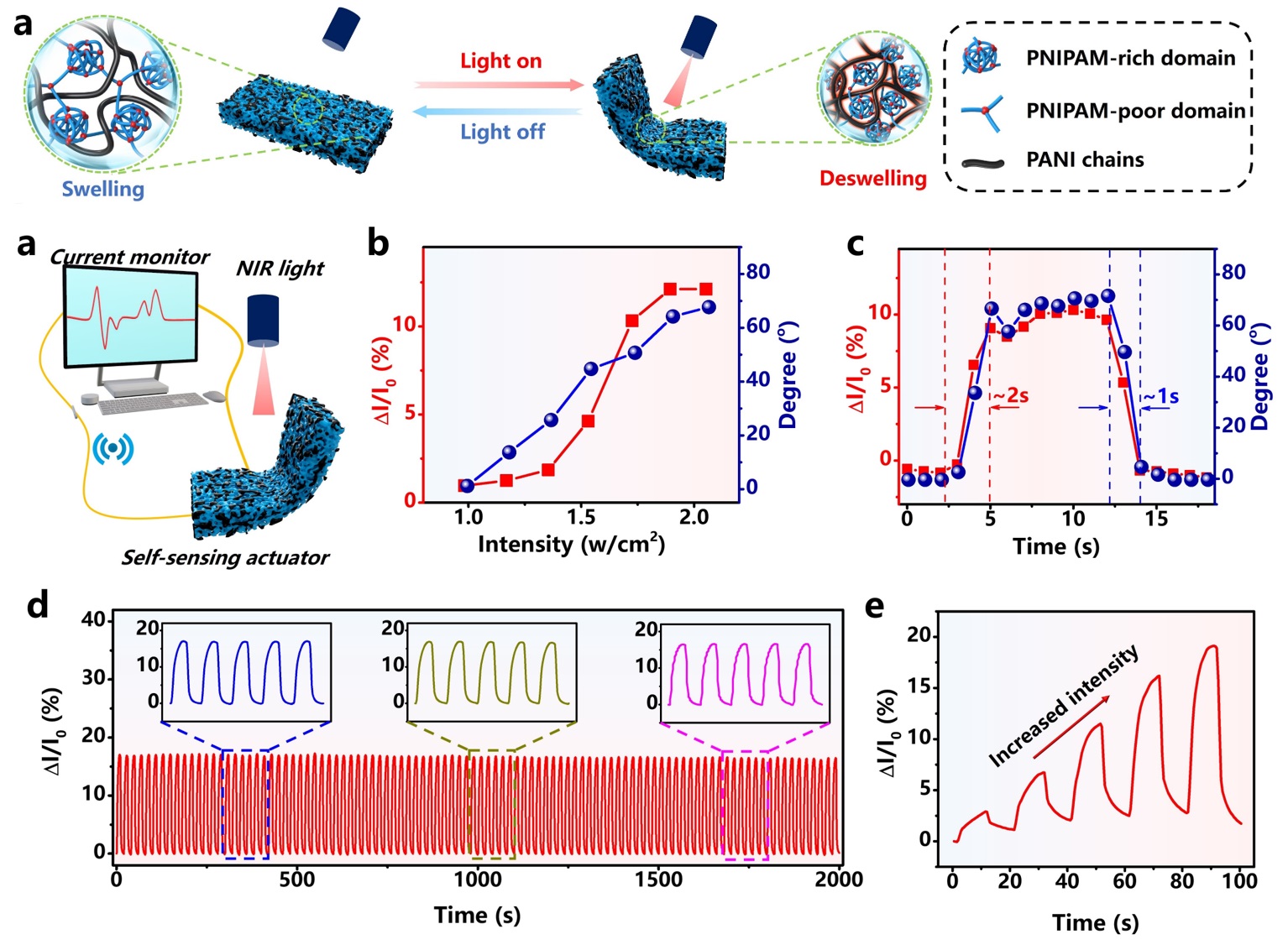
���c2���뻥���Y�������ĵ��t�����`��늌W�Ը�֪����
����������ԭλ�����ۺϵķ�ʽ���ں��d��PNIPAMˮ���z��ԭλ�ۺό�늾ۺ���PANI���γ��˾���늌W���ܵİ뻥�����d��ͺ�ˮ���z��������̼��£���PNIPAM�W�j�l���տs�������������l����׃�r��������PANI����朰l���������w�ƣ��M��ʹ��늌W���ܮa��������׃������K���F����������׃��늌W���С�������PNIPAM�W�j�cPANI�����֮�g���صİ뻥���Y�����ɷN�ۺ�������܉��ڽӽ����Ӽ��e���^�߶�����Ч�ͺϣ����������������׃�О��c늌W������̖��ͬ�r�a�����Y���@ʾ������������늌W������̖���H���F�����c�����О�һ�µij���푑��ٶȣ�푑��r�g���s2s���֏͕r�g���s1s����Ҳ��100�εĜyԇѭ�h��չ�F�������õ�ѭ�h�����Լ���ͬ�̼������µ��B�m�yԇ�����������������ĵ��t��늌W�Ը�֪�I��չ�F��һ���đ��Ý�����
�D�����뻥�����d��ˮ���z������늌W�Ը�֪���ܜyԇ
���c3������ˮ���z���������ˑB�Ŀ������{��
�ڿ������������o�t����늌W�Ը�֪���ܻ��A�ϣ�ͨ�^�B�ӵ��O�y�����Ԅӿ���ϵ�y�����{�C�������M�ɵ��]�h���ƻ�·�У��뻥�����d���Ը�֪ˮ���z����չ�F�����c��Ȼ�������������w��������{���О顣��ԓ��·�У��뻥�����d���Ը�֪ˮ���z����������������w������ϵ�y�и�������Ч�������p�����ã����ݔ�����̖�ͽ��յļt�����̖����ģ�M�����w�Ă����͂�����Ӌ��C����������������늌W��̖�M�Ќ��r�O�y���Ԅӿ���оƬ�����И��ɼ���̖����������ָ����h���г��F�ɔ_���ɔ_��Ӱ����������������О��ˑB�r�������䷴�����Č��r늌W��̖���]�hϵ�y�܉��ڟo�˸��A����r������������̎�ĭh����r�M�п����Д࣬�������������О���ˑB�M�������{�������F���������ڏ��s�h���е����m������������
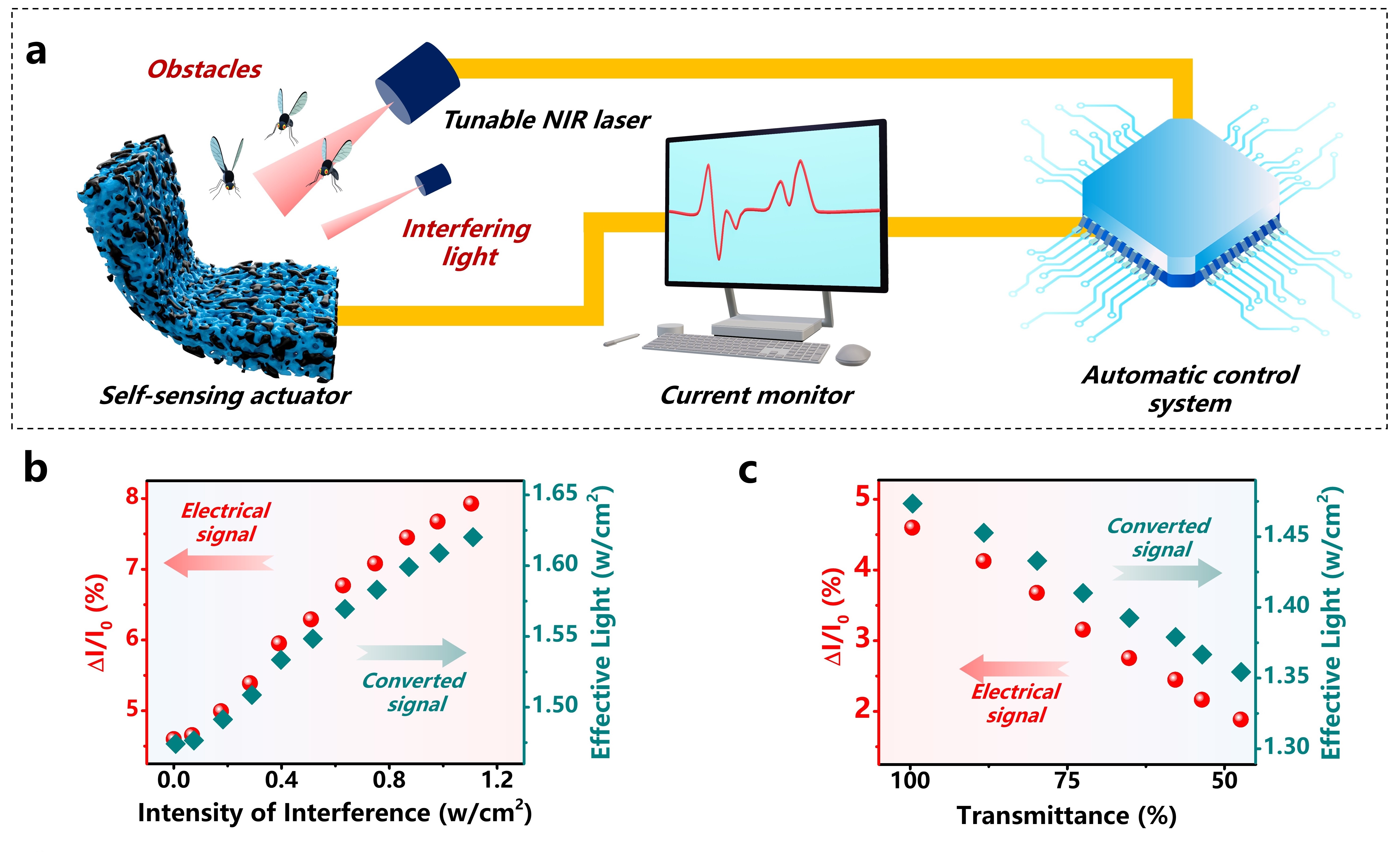
�D�ġ��]�h���ƻ�·�а뻥�����d��ˮ���z�����������{������
�YՓ��ԓ�������Üض��T������x�ۺϺ�ԭλ�����ۺϣ��Ƃ�����PNIPAM��PANI�M�ɵİ뻥�����d���Ը�֪ˮ���z����ԓ���Ϙ����ɵľ��й�����׃�������Ը�֪�������������F����푑����ʡ��߶ȿɾ����Լ����r�Ը�֪���T�����c���ڼ��ɵ��]�h���ƻ�·�к��Ը�֪���������܉�����c��Ȼ�������������w��ӽ��Č��r��֪�����������{���О顣ԓ���ϵ��Ƃ䣬����һ������ܛ�w�C���˵��OӋ�������ṩ���µ�˼·��
ԓ�ɹ��ԡ�Sponge-Like, Semi-Interpenetrating Self-Sensory Hydrogel for Smart Photothermal-Responsive Soft Actuator with Biomimetic Self-Diagnostic Intelligence�� ���}�l���ڡ�Chemical Engineering Journal���ϡ���https://doi.org/10.1016/j.cej.2023.143515���|����W���F�������ڡ��Ϸ��������c���ִ�W���������ڞ����µĹ�ͬͨӍ���ߡ�
ԭ��朽���
https://authors.elsevier.com/a/1h6Nj4x7R2gMw1
https://doi.org/10.1016/j.cej.2023.143515
