
���ؘ�(g��u)ܛ�w�C(j��)��������һ�N��ܛ�ķeľ���ɸ��N����ģ�K�M�ɣ������p�ɲ�ж�����°��b���κ���Ҫ����ʽ��һ���棬���߂���ؘ�(g��u)�C(j��)�����������ԡ��ɻ��Q�ԺͿɔU(ku��)չ���ă�(y��u)��(sh��)���p���������O(sh��)Ӌ(j��)�r(sh��)�g������������ɱ���������ˮa(ch��n)Ʒ��ͨ���ԣ���һ���棬��Ҳ�^����ܛ�w�C(j��)������혡���ȫ�����ԣ��ڑ�(y��ng)��(du��)�ǽY(ji��)��(g��u)���h(hu��n)����̎��������Ŀ��(bi��o)��r(sh��)�߂��@����(y��u)��(sh��)���F(xi��n)�еĴ����(sh��)ģ�K���O(sh��)Ӌ(j��)�϶��й̶��ĽY(ji��)��(g��u)���ܣ���ˮ�(d��ng)����(g��)ģ�K�M�ɵęC(j��)������Ҫ�{(di��o)���r(sh��)��Ψ��ͨ�^���Q��ͬ��ģ�K���܌�(sh��)�F(xi��n)�������ã��@��(du��)�����gλ�õ�ģ�K��Q�Լ�ģ�K���|������Ҏ(gu��)����ʮ�ֲ��Ѻõġ����о������һ�N�ּ�(j��)���ؘ�(g��u)�IJ��ԡ��@�N���Բ��Hʹ�C(j��)���˾߂���y(t��ng)ģ�K�������ă�(y��u)��(sh��)����ͨ�^ģ�K�g�ĽM�ρ혋(g��u)����ͬ�ęC(j��)���ˣ���һ���ؘ�(g��u)����߀��ͨ�^�ؾ���ģ�K��(n��i)�ď�������(d��o)Ԫ�������ṩģ�K�Ķ�N�\(y��n)��(d��ng)ģʽ���ڶ����ؘ�(g��u)����ԓ�O(sh��)Ӌ(j��)���Կ˷�������ģ�K��ܛ�w�C(j��)�����\(y��n)��(d��ng)ģʽ���ɸ�׃��ȱ�ݣ���ģ�K�����O(sh��)Ӌ(j��)�����������˸��ߵľS�ȣ���C(j��)�����{(di��o)�����N��(g��u)�ͺ����ṩ�˸����x�����磬����ģ�K�g���������ã����Ԙ�(g��u)������x�C(j��)���ˡ�ȫ�����ЙC(j��)���˺�ܛ�w�C(j��)е�ֵȑ�(y��ng)�Ì�(sh��)�������⣬�ɶ���(g��)ģ�K��(li��n)���ɵ�ܛ�w�C(j��)е��Ҳ�܉�ͨ�^ģ�K�\(y��n)��(d��ng)ģʽ���ؾ��̣��������O(sh��)Ӌ(j��)�\(y��n)��(d��ng)܉�E�������g���������M(j��n)������(g��)ģ�K�ĸ��Q��ԓ�����@��������ģ�K��ܛ�w�C(j��)���˵IJ����y�Ⱥͳɱ���

�D1 �ּ�(j��)���ؘ�(g��u)����
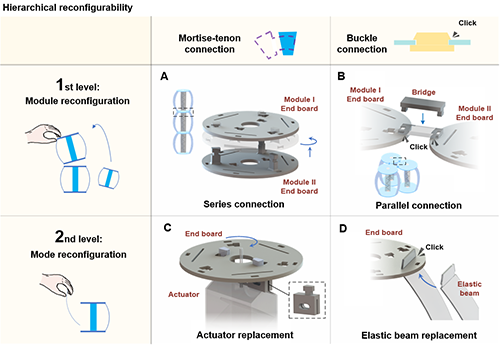
�D2 ģ�K�����܆�Ԫ���B�ӷ�ʽ
�D3 ģ�K��N�\(y��n)��(d��ng)ģʽ������


�D5 ��ģ�K��(li��n)��ƽ��ȫ���Ƅ�(d��ng)�C(j��)����

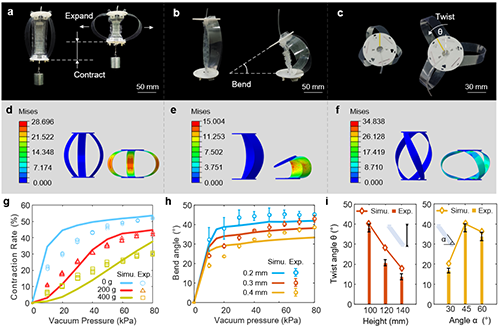
�D6 �ּ�(j��)���ؘ�(g��u)�ęC(j��)е��
ԭ��朽�https://onlinelibrary.wiley.com/doi/10.1002/adfm.202414279
���߽�B
ͨӍ���������������Ϻ���ͨ��W(xu��)�C(j��)е�c��(d��ng)�����̌W(xu��)Ժ��Ƹ���ڣ���ʿ����(d��o)������(gu��)�ҽܳ��������@���ߡ��L(zh��ng)�ڏ����C(j��)�ϵ�y(t��ng)��(d��ng)���W(xu��)�O(sh��)Ӌ(j��)��ܛ�w���ܸ��(q��)ϵ�y(t��ng)�ȷ�����о����Ⱥ����ְ�����(gu��)����Ȼ�ƌW(xu��)�������c(di��n)�(xi��ng)Ŀ�ڃ�(n��i)��30���(xi��ng)�����(xi��ng)Ŀ����Science Advances��Nature Communications��Advanced Materials���ڿ��ϰl(f��)��W(xu��)�g(sh��)Փ��280��ƪ���ڙ�(qu��n)��(gu��)�Ұl(f��)��������ܛ��������(qu��n)100���(xi��ng)������ͅ�������5����
ͨӍ�������������ͬ��(j��)��W(xu��)���պ����c���W(xu��)�W(xu��)Ժ��Ƹ�о��T����ʿ����(d��o)������Ҫ����ܛ�(q��)�ؼ��g(sh��)�������C(j��)���˄�(d��ng)���W(xu��)�O(sh��)Ӌ(j��)�c�����о��������һ����ͨӍ���ߣ����P(gu��n)�ɹ��Ѱl(f��)����Nature Communications��Science Advances, Soft Robotics�ȇ�(gu��)�H�ڿ���
��һ���������������Ϻ���ͨ��W(xu��)�C(j��)е�c��(d��ng)�����̌W(xu��)Ժ��ʿ�����о�����?y��n)��?d��ng)ܛ�w�C(j��)�������W(xu��)�O(sh��)Ӌ(j��)�Ϳ����о������P(gu��n)�ɹ��Ѱl(f��)����The Innovation, Advanced Functional Materials, ���Ї�(gu��)�ƌW(xu��)���������W(xu��)���ČW(xu��)���ȇ�(gu��)��(n��i)���ڿ���
- �A��������W(xu��)��ِ�A�����n�}�M Small���ɹ�-���pģʽ�f(xi��)ͬ�����(q��)��(d��ng)���������Y(ji��)��(g��u)ܛ�C(j��)���� 2023-12-11
- ��ʿ�m��W(xu��)Thomas P. Davis���������F(tu��n)�(du��) NC��3D��ӡҺ�B(t��i)���پۺ����(f��)�ϲ������ڽ��t���푑�(y��ng)��4D��ӡܛ�C(j��)���� 2023-12-04
- ͬ��(j��)��W(xu��)����͡���ڈF(tu��n)�(du��) ��ACS Macro Lett.������?f��)�Y(ji��)��(g��u)����ۺ���W(w��ng)�j(lu��) 2023-09-18
�\(ch��ng)���P(gu��n)ע�߷��ӿƼ�

- ����(b��o)���C(j��)��(hu��)��500+ˎ��...
- ��(gu��)�HƷ�ơ�ǰ�ؕ�(hu��)�h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ��(gu��)�a(ch��n)������٣����(gu��)���^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��(hu��)
- �Ј�(ch��ng)��300�|��PMEC China ɫ...
- ����ע��(c��)��2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �����ϸ��Լ��ӹ����g(sh��)Ҫ�I(l��ng)��...
- �Ϸ��Ƽ���W(xu��)�����w���ڈF(tu��n)�(du��)...
- ���ϴ�W(xu��)������/����Ⱥ/����...
- ̫ԭ������W(xu��)�~���/��ʯ��...
- ���_������W(xu��)/�����ش�W(xu��) CR...
- ��h��W(xu��)ꐳ������߶���/��...
- ��ƴ��R��l(f��)�݈F(tu��n)�(du��) AFM��...
- ����W(xu��)�~������ Macromole...
- ����������n�}�M��Macromol...
- ����݆֪ͨ | ����ø߷���...
- �Ͼ���W(xu��)����x/��� Angew....
- �K�������һԺ������...