
�����������һ�N�ɾ����¼��ӣ�Programmable and event-driven��PED���|�X��������ģ�����wƤ�w���ӴΙCе��������푑��C�ƣ������ݶȽ�����������Y���OӋ�����F����ͬ���ȉ����ĸ߾��ȸ�֪��ͨ�^���|�l��ͬ�߶����Y����Ԫ����Ч�{���������Ќӽ��|��e���x��������Խ�ĉ��������c�¼������ԣ����F�ˉ������ȵ��B�m���a���@���Ӿ���̖͵İl����PED�|�X������չ�F�����������ܣ�����`�����_2501?kPa?1���z�y�������w��420?kPa���^���y�����Y���ӿڷքe������350%��300%��ͬ�r�߂�O�͵ĉ����z�y�ޣ�2?Pa���c����푑��r�g��12?ms�������`���R�e������׃�������l�ӑBݔ�룬չ�F��Խ�Č��r�|�X��֪�������ڑ��Ì��棬���������ɷֲ�ʽPED�|�X�����������˾߂���g�ֱ����������w�R�eϵ�y��ͨ�^һ�S���e�W�j��ץȡ��̖�M��������ȡ�����F�˸��_97.2%�����w݆���R�e�ʴ_�ʡ����⣬����PED�|�X�������_�l�Ĕ���������ϵ�y��Чͻ���˂��y�ֱ�������ҕ�X�ړ��c�������ކ��}��֧�ֶ�ָ���������c�p���|�Xͨ�ţ��@��������̓�M�h���еij������c�挍�С��Mһ���أ�ͨ�^�����˻��ڌ��r�������������m��ץȡ�C�ƣ�ʹ�Cе���܉�ӑB�{��ץȡ���ԣ����F�o���˹����A�ĸ߾��ȡ��o�pץȡ������
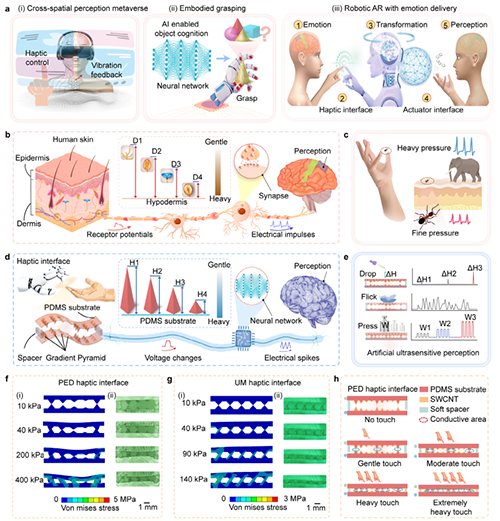
�D1 PED�|�X���������������l�����ЙC���о�
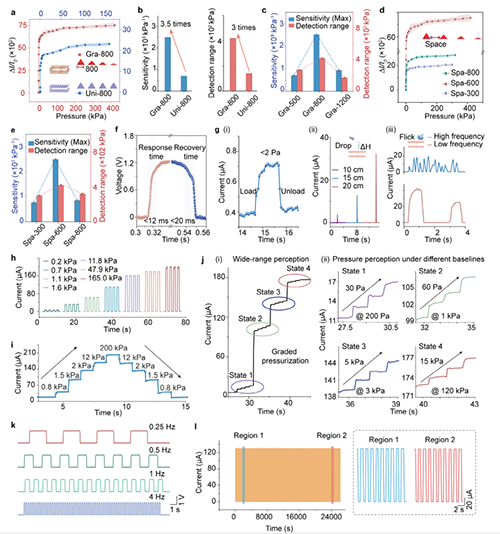
�D2 PED�|�X���������P�I��������yԇ

�D3 �ں��¼��әC�Ƶ��|�X�J֪ϵ�y���ڸ߾������w�R�e
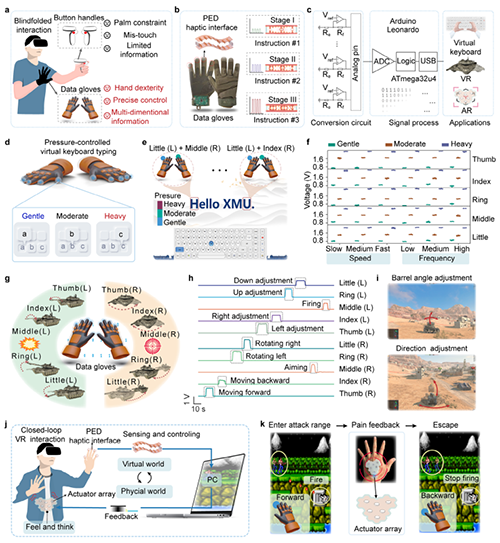
�D4 ���ڔ��������|�X�]�hϵ�y�x��̓�M�c�����F������
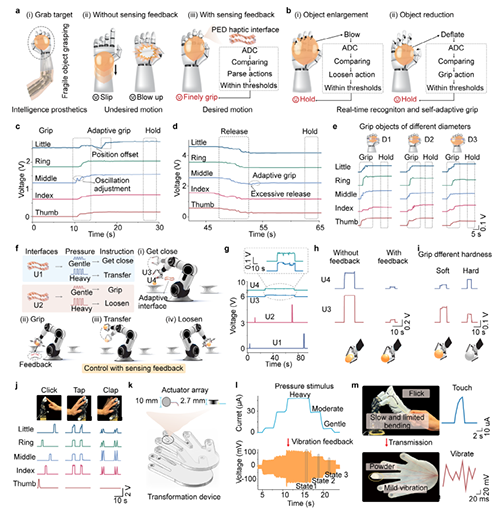
�D5 ������з��������m���C����ץȡϵ�y
���P�о��ɹ�����Highly programmable haptic decoding and self-adaptive spatiotemporal feedback toward embodied intelligence�� ���}�l����Advanced Functional Materials��2025, 10.1002/adfm.202500633���ڿ��ϡ�Փ�ĵĵ�һ���ߞ�B�T��W��ʿ�����f����ͨӍ�����ǏB�T��W�����������ڡ�ԓ��о������õ��ˇ������c�аlӋ����������Ȼ�ƌW���𡢸��BȪ��������ʾ���^�fͬ�Ŀ������ʡ��Ȼ�ƌW���������У�������ИI���M���Ŀ���Y����
Փ����Ϣ��Wansheng Lin, Yijing Xu, Shifan Yu, Huasen Wang, Zijian Huang, Zhicheng Cao, Chao Wei, Zhong Chen, Zeliang Zhang, Zhenyu Zhao, Qingliang Liao, Yuanjin Zheng, and Xinqin Liao*. Highly programmable haptic decoding and self-adaptive spatiotemporal feedback toward embodied intelligence. Advanced Functional Materials 2025, 35: 2500633. (IF=18.5��һ�^TOP)
Փ��朽ӣ�https://doi.org/10.1002/adfm.202500633
