���y(t��ng)�Ļ��Բ����������������\���y�Կ��ƣ��Լ��\��܉�E�y���A�y�Ȇ��}�����գ��о��ˆT�OӋ��һ�N�ɼt����ӵ�ܛ�w�C���ˣ����������ȶ�܉���ڿ����\ݔ���w������ڿ����|܇���@�Nܛ�w�C�����܉������80�ȵ��¶������������ܳ��d���_��������12����ؓ�d�����⣬�OӋ�ߞ��˜yԇԓ�Y�����ڲ�ͬ܉�������e�ԣ�����ͬ���|���ߴ磬�������ڳߴ�ͻ׃��܉���M���˜yԇ��

���գ��о��ˆT�OӋ��һ�N����ƽz�������܉�����е�ܛ�w�C���ˣ��D1��������Ϟ�Һ�������w����(j��ng)�^Ť�D����������������l���Π��Ȼ��ĩ���B�ӣ��γ�һ������֭h(hu��n)���]�h(hu��n)�����w���f���@�������h(hu��n)��Y���@��܉���p�@�˃ɵ���Ȧ��ʹ�íh(hu��n)���c܉��ƽ�еĽǶȑҒ졣����ԓ���ϳ�ɫ�ğ���Ч��������¶���c܉����ֱ�ļt����r�����չ⾀���Ľz�����֕��տs���a���L���\�ӣ�������IJ����տs�����ض��^�͵IJ���������Յ^(q��)���@�����S��ӟᣬ����ǰ�ӟ�IJ����_ʼ��s�����ѭ�h(hu��n)���͡��S��ܛ�w�h(hu��n)������Ť�D�L�ӣ���������܉���Ƅӡ�

�D1��(A) �����h(hu��n)��ܛ�w�C���˵ĽY�����乤��ԭ����(B) ԓ�Y���ڹ����^���еļt��z��ضȈD��
����ԓ�����ܵ���܉���|܇�ȳ�Ҋ�Ľ�ͨ���߆��l(f��)���yԇ�ߌ���Ғ��c����ʲ�ͬ�Ƕȵ�䓽z܉���ϣ��Ԝyԇ���ʸ����еķ�(w��n)���ԡ����ڲ���ֱ�ӑҒ죬���ǵ����������h(hu��n)�b�����������Y����ԓ�OӋ����ͨ�^�{��(ji��)�Ғ���܉���ϵ�Ȧ��(sh��)����׃Ħ������ʹ���ʸ��ø����ι̣���߿������¶ȿ��_�ӽ���ֱ��80��ȣ��D2����
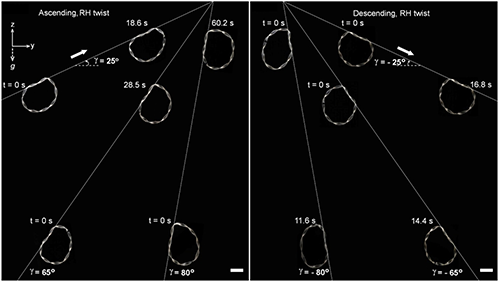
�D2��ԓܛ�C�����ز�ͬ�Ƕȵ�܉���ʾ�������_�c����A�Ǟ�80�㡣
�о��ˆTչʾ��ܛ�w�h(hu��n)�ΙC���˿����ڼ�������^�l(f��)��������ܵ�܉�����\�С�ܛ�w�C����߀�ܿ˷�܉���ϵ��ϵK�������Y��¡�𣨈D3A�����о��ˆT߀��ʾ�˙C���˿��Գ�����������12�����ҵ�ؓ�d���D3B����
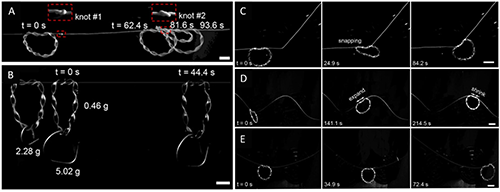
�D3��ԓܛ�w�C�����m���ڲ�ͬ����������I(y��)��(A) ܉���ϴ��ڴ�Y��ģ�Mͻ׃/�ۓp�� (B)��ԓ�h(hu��n)��Y��ʩ����������ʮ�����ϵ�ؓ�d�� (C) ܉�����ڼ�ǣ�(D) ܉������ӏ��s�������Y����(E)܉������������w����̎����ȫ�ɳڠ�B(t��i)��
���⣬���y(t��ng)�|܇���|�K����һ���ėl�����ƣ�ԓ�OӋ�ڿ˷��@Щ������������һЩͻ�ƣ��D3C-E�������猦�ڄ����|�K�����|�K���ڷǹ⻬��ͻ׃��������Ҫ�D�^�J���ĽǶȣ�ԓ�����������Ե���������ʹ��a��һ���ֲ���׃��ʹ���܉������`���ͨ�^ԓ�Ƕȡ����⣬���ڸ��ӏ��s�����S�Y��������������Y����ԓ�C�������f�����`��ͨ�^����Փ���v��ԓ�������ӹ���ڵĜضȈ��ȿ��Խ�(j��ng)�ɼ��O��܉�����_����λ�ã��@Ҳ��܉����O�ă�(y��u)�����ڡ�
ԓ�������}���顶Aerial Track-Guided Autonomous Soft Ring Robot�����l(f��)����Advanced Science�ϡ���һ���ߞ鱱���_�R�{������W�Cе�c���պ��칤��ϵ��ʿ���᷽����ͨӍ���ߞ�ԓϵ�������ڣ���ͬ����߀��ԓϵ��ʿ���ܲ�ֲ���庣�����Լ��O껝ɡ�
������Ϣ��
F. Qi, C. Zhou, H. Qing, H. Sun, J. Yin, Aerial Track-Guided Autonomous Soft Ring Robot. Adv. Sci. 2025, 2503288.
https://doi.org/10.1002/advs.202503288
- ������܊��/�܊μ���ڈF� Adv. Sci.����ܭh(hu��n)����֬�о������Mչ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ��������ʎ���������ܛ�w�C���� 2024-10-26
- �۳Ǵ�Cе�����ϽM�\��2025�^ȫ����ʿ���о����� - ���W���Cе��ܛ�����������㷨 2024-10-17
- ���K��W���ս����n�}�M AFM�����w�w���ӳ�����Һ�������w 2025-06-24
- �eϦ���၆��W�����F� Adv. Mater.: �аl(f��)��ģʽ����׃ɫҺ�������w�� 2025-06-16
- ̹���״�W����ˬ��ʿ Adv. Mater.: �o�����l(f��)�� - �u�IҺ�������w��������������� 2025-05-31
