2018��12��20�գ����H�����W�g�ڿ����ƌW?�C���ˌW����Science Robotics���ھ��l���ˡ�ܛ�w���ڙC���ˡ���Soft wall-climbing robots���о�Փ�ġ�ԓՓ�����Ϻ���ͨ��W�Cе�c�������̌WԺ�C�����о����c��ʡ�����WԺ����ܛ�w���ό���Һ�����ɣ��Ϻ���ͨ��W���һ��λ���ȇ�ӭ�����Ͳ�ʿ�о����u����Փ�Ĺ�ͬ��һ���ߣ�������������w�x�R�������ȇ�ӭ������Փ�ĵĹ�ͬͨӍ���ߡ�
ܛ�w�C������Ҫ������ܛ�����ӵ��˹�����M�ɣ��߂�Y��-��һ�w�����c���ڽ��|�ⲿ�h���r�ܮa�����ӵ����w׃�Σ����ИO�ߵ�����ԡ��������������͵�ܛ�w�C����ԭ��ϵ�y������ܛ�wץ�֡�ܛ�w���ЙC���ˡ�ܛ�w���b�C���ˡ�ܛ�w���L�C���˺�ܛ�w�Cе�~�ȣ����^�ڇ����⌍��ҳ��F������һ헶��W�ƽ����ǰ�ؼ��g��ܛ�w�C���˴�������˙C���c�����w֮�g�ľ��x���w�F�˙C���˼��g��δ���lչڅ�ݡ�
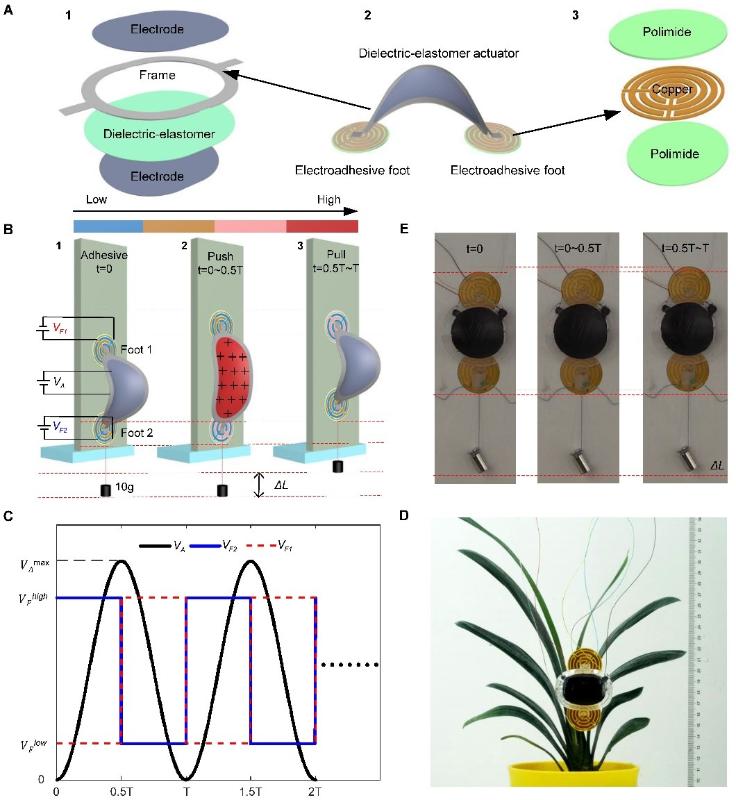
ܛ�w���ڙC���˵��OӋ����ԭ������A���Y���OӋ����B������ԭ������C���fͬ���Ʋ��ԣ���D���������ڌ��ʾ�⣻��E����10gؓ�d���ڌ��ʾ��
�Ϻ���ͨ��W����ꖽ��ڡ��ȇ�ӭ���ڈF��c��ʡ�����WԺ�w�x�R���ڈF������������ׂ��ɽ�늏����w�˹�������o������_�Ƙ��ɵ�ܛ�w���ڙC����������2g�����L85mm�������н�늏����w�˹����������әC���˱��w�Ŀ��������\�ӣ��o������_�����ڮa���r�g�Ϳ��g�ɿص��o����������C���˵ķ������������\���ɽ�늏����w�˹�������o������_�Ƶąfͬ���Ɓ팍�F��
���Y���@ʾ��ԓܛ�w�C���˾����c�����w��ƵĴ�ֱ���ڡ�ˮƽ���С�ԭ���D�����������ݵĭh���m���\�����������Qֱ�MС���g�е�̽�y���ѾȺ͉�����������չ�F�˝��ڑ���ǰ����

ԓ�о������õ��ˇ��҃�����������Ŀ��������Ȼ�ƌW����ί���ڙC�����ش��о�Ӌ�����c�Ŀ���Ϻ��п�ί���Ƽ������Є�Ӌ�������A�о��Ŀ���Y����
Փ��朽ӣ�http://robotics.sciencemag.org/content/3/25/eaat2874?from=timeline
