�˿������Cе�裬���C���˅s�����������衣һֱ�ԁ����аl(f��)�`����Ҿ�����˹��ܵęCе�����˂����Ŀ�ˡ�Ȼ����Խ�`����ĽY(ji��)��(g��u)��Խ��(f��)�s�Ĺ��ܽK����(d��o)�¼�֫�ijߴ硢�����h���������֡���ˣ�������������ּ������·ϵ�y(t��ng)�ɞ�һ�N��Ȼڅ�ݡ�����ڻ��ڸܗU���q机��X݆�Ȅ���ϵ�y(t��ng)�Ă��y(t��ng)�Cе�֣����ڼ����(q��)�ӵ����w����W(xu��)��֫�t�����������`��Ҳ�����к��m�ijߴ硣
Ŀǰ�����õ����w����W(xu��)��֫��Okada�Cе�֣�Utah/MIT�Cе���Լ�DLR�Cе�֡��@Щ�Cе�ֵķ��漡����Ҫ�����������z��PET���ϵ��Ƴɡ����@Щ���y(t��ng)���ϵ��g���^��g����ָ�����ڔ���ǰÿ��λ�w�e�����յ��������������ԑ�(y��ng)����֫�L���Ҷ���؏�(f��)��ʹ�á���һ���棬�������Ͼ�����(d��o)늣����܌������·�c����ϵ�y(t��ng)���ɞ�һ��������ϵ�y(t��ng)�M�����F(xi��n)�O(sh��)Ӌ�ߴ�ĿsС����ˣ��_�l(f��)ͬ�r���и��g�Ժ�늌�(d��o)�ʵļ�����τt�ɞ��P(gu��n)�I��
���գ��¼�������������W(xu��)ꐕԖ|�����о��Fꠡ��㽭��W(xu��)��²����ں��¼���A*STAR�̜Y���о��T�о��F����������g�Բ���֩��z����������PEDOT:PSS@SWCNT��ʹ֩��zͬ�r���и��g�Ժ�늌�(d��o)�ʣ�ʹ���g��ֵ�_��420 MJ/m3��늌�(d��o)���_��1077 S/cm�����ܳ��^Ŀǰ�Č�(d��o)늲��ϣ���D1��ʾ����
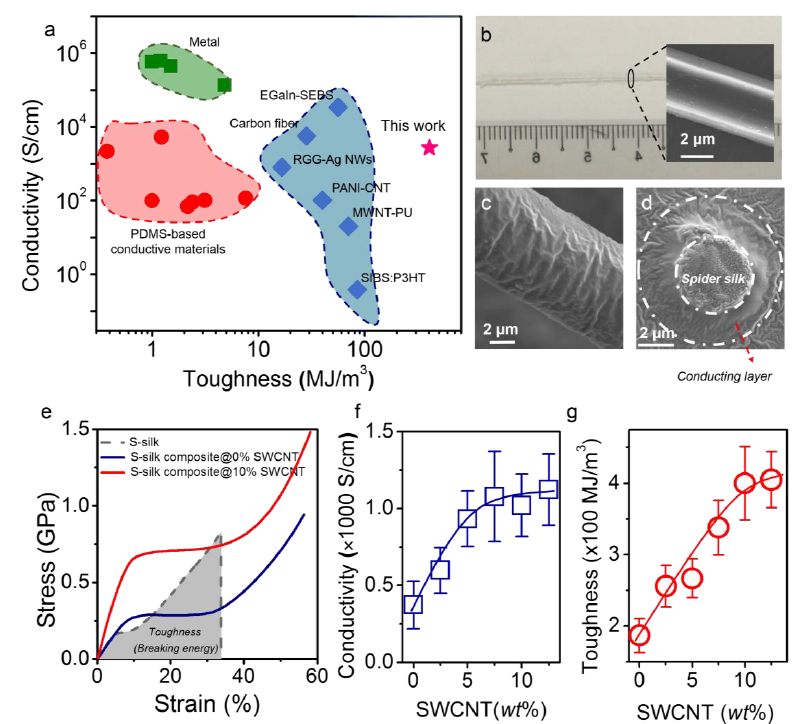
�D1. (a)��ͬ��(d��o)늲��ϵČ�(d��o)����Լ��g�Եı��^����ɫ����Ǵ�����������(b)֩��z����D��(c)(d)��(d��o)�֩��z����R�D�Լ��M����D��(e)��(d��o)�֩��z�đ�(y��ng)����(y��ng)׃������(f)(g)��(d��o)�֩��z��늌�(d��o)���Լ��g���S�α�̼�{�ܺ�����ͬ��׃��������
�о��ˆT�������ˆα�̼�{�ܵ�֩��z�Ƃ���ˡ�늼��족��ԓ늼���ͬ�r���и�늌�(d��o)�ʺ��g�ԣ��c����������һ��M�b���������w����W(xu��)�Y(ji��)��(g��u)�ęCе���ϣ����yԇ�����ܡ��Y(ji��)���@ʾԓ�Cе�ֵĆθ������܉�������s7.6 Kg��ؓ�d��ͬ�rԓ�����܉��؏�(f��)����/�������^4�f�ζ���늌�(d��o)�ʻ������ֲ�׃����D2a��2b����ʹ��ԓ늼���Cе�ֵľC�������h����䓽z��������̼�w�S�����z�Ȳ��Ϟ鼡��ęCе�ֵ����ܡ�����о��ˆT�����˻��ڌ�(d��o)���z�ͷnj�(d��o)�����������֫ץȡ���w���^�̡�ͨ�^���Ȱl(f��)�F(xi��n)����鼯���ˉ�������ϵ�y(t��ng)������늼���ęCе���܉�ܺõ�ץȡ�������������ęCе�օs�y��ץȡ����D2c��2b����ԓ�������аl(f��)�`���Ҿ��ж�ܵļ�֫�ṩ���µ�˼·��
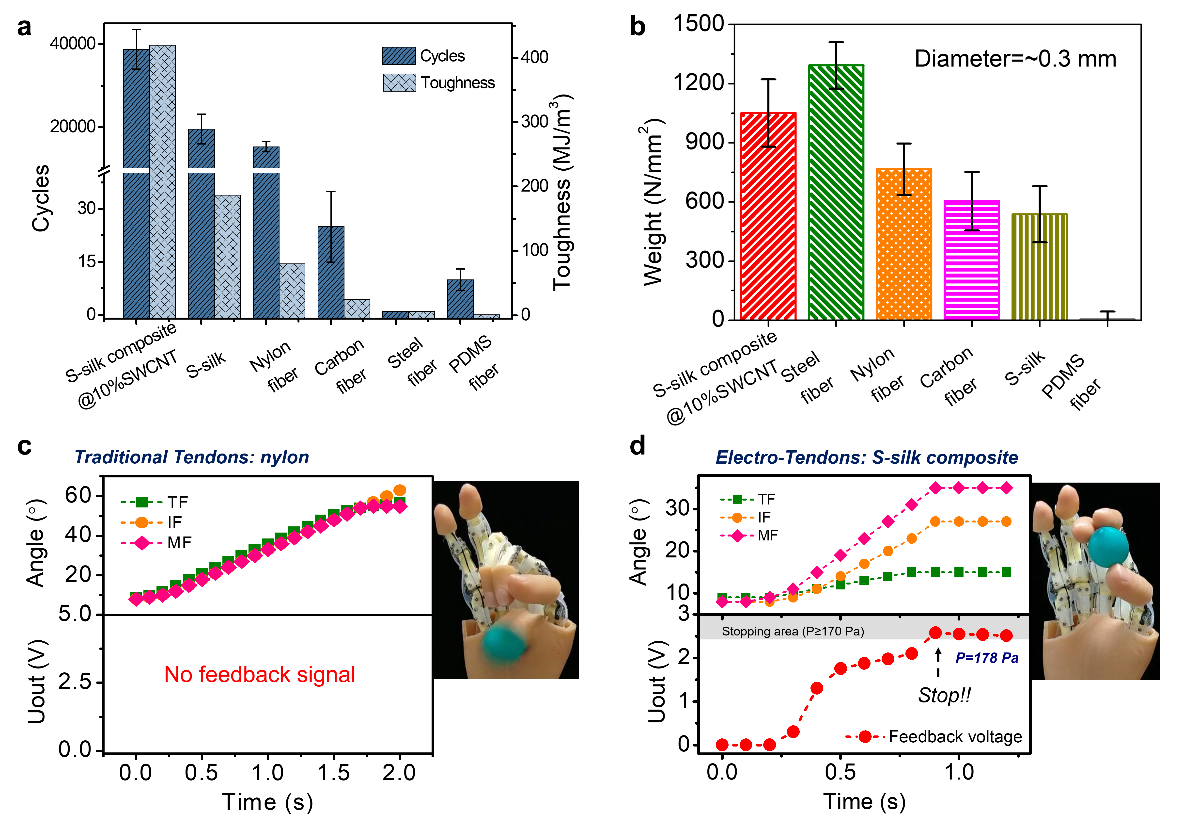
�D2. (a)���ڲ�ͬ���ϙCе�ֵ����쏝���Δ�(sh��)���^��(b)���ڲ�ͬ���ϙCе��ؓ�d���^��(c)(d)���������Լ���(d��o)�֩��z�ęCе��ץȡ������^�̱��^��
���P(gu��n)�������}Ŀ�� A supertough electro-tendon based on spider silk composites �l(f��)����Nature Communications (Nat. Commun. 2020, 11, 1332)�ϣ�����Ո����һ헣�Singapore Patent Application No. 10201807020R������о�����߀�õ����¼���A*STAR�������������㽭��W(xu��)�����A�����Ĵ����f(xi��)����
�\���P(gu��n)ע�߷��ӿƼ�

- �Ї��ƴ����d���n�}�M���邐...
- �A��������W(xu��)���V�ա����ݴ�...
- �A�ώ����� Small���w�S��...
- �K���־�h/�������K��һ...
- ���������W(xu��)�����¡��S�؈F...
- �㽭��W(xu��)�߳����ڈF� ��Nat...
- ���д����ڣ��Ʊ��ҡ�����...
- �������/˾һ�����۳Ǵ�...
- ����W(xu��)�����h���ڈF� AFM...
- ��ɽ��W(xu��)����n�}�M CEJ����...
- ���ݴ�W(xu��)�����ƽ��ڈFꠡ�Ac...