�B�m�ɿص�����׃��������ʹܛ�w�C���ˌ��F��ܵ���Ҫǰ�ᡣĿǰ��ܛ�w�C���ˌ��F׃�ε���Ҫ�ֶΞ��{�ر����Y�������ʡ�Ȼ���������ı����ܛ�w�C����߀���ڟo�������ؘ�������y�Գ����^����d�Ȳ��㡣
���գ����������WԺChiara Daraio�����n�}�M�����һ�N�����M�пɿ����S��������׃����ܛ�w�C���ˣ�����չʾ����ٿغ��d��������ԓ�ɹ���Robotic surfaces with reversible, spatiotemporal control for shape morphing and object manipulation��Փ���}Ŀ�l����Science Robotics ��DOI: 10.1126/scirobotics.abf5116���ϡ�
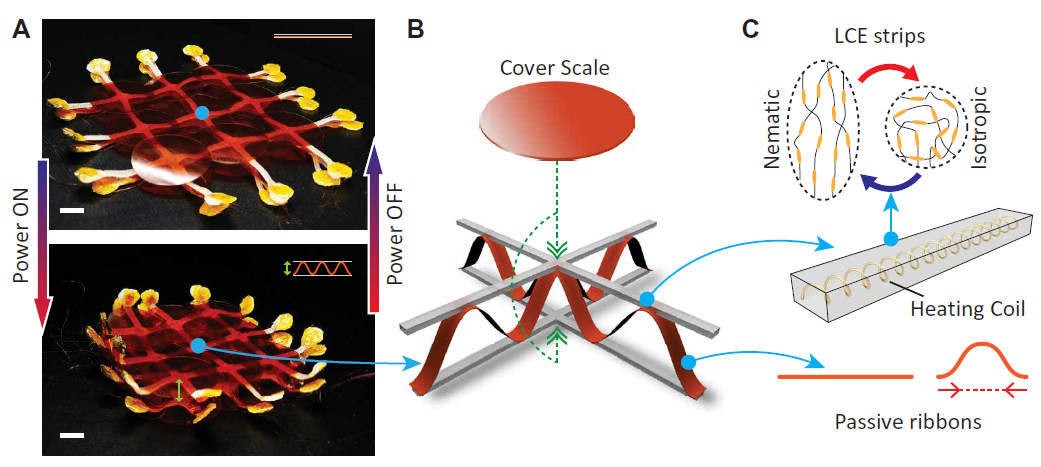
�D1. ��������ܛ�w�C���˵��OӋ��
ԓ�OӋ�ɃɌ����ӾW���һ�ӱ��ӾW�ɊA�������νY�����o���w���[Ƭ�혋���B�m�ı��档���ӾW����Ƕ���˼ӟ����z��Һ�������w���ϣ�LCE�����ɣ�����ͨ늼ӟ�r�տs�����������ã����ӾW����տs������ɾ���������Ĥ��Kapton�����ɵ����g�ӱ��ӾW�������׃�Σ��γɲ��y���֧�νY�����Ǽܰ�����á����������С�IJ�ͬ�����Ɍ����ӾW���ڲ�ͬ����ľֲ��տs׃�ο����M�Ќ��r�����{�������ڌ��ښ��w���ԣ�������ȡ�Q�����±���ľֲ���׃������@�N����ܛ�w�C���˿���ͨ�^�{��ݔ�뵽���Ɍ����ӾW����������׃�Q���ʣ��γɸ�������Π
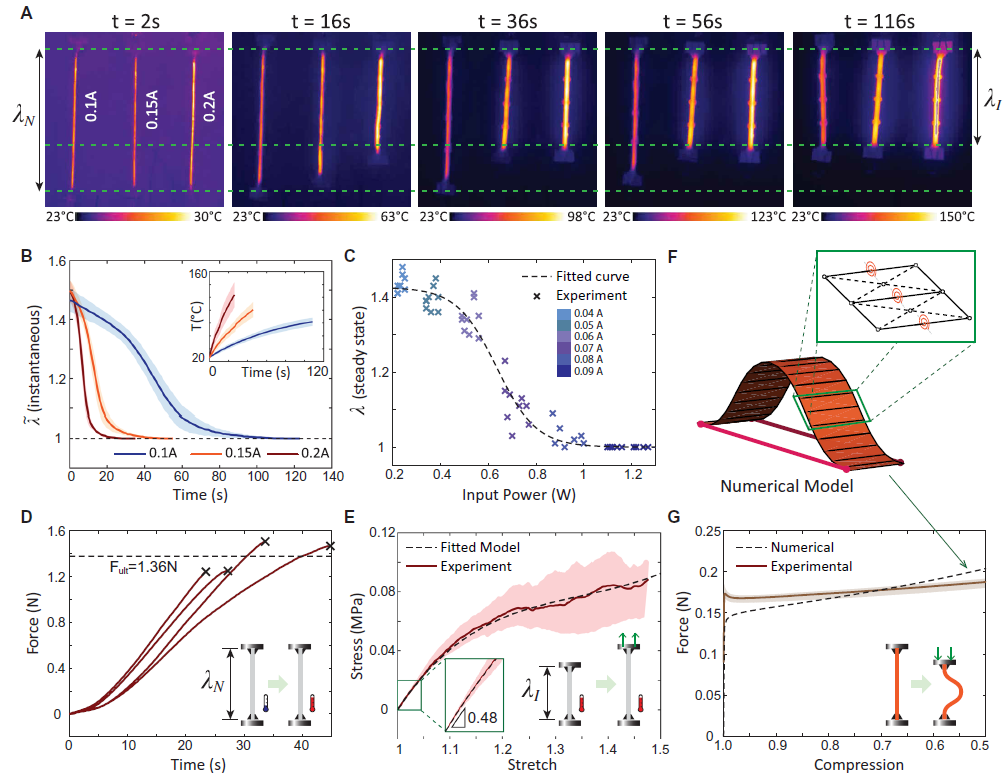
�D2. ����һ�����IJ������W���|��
��A-E��LCE������늟����µğ�-���W���|����F-G��Kapton���ӌӵ�ƽ��������׃�Ρ�

�D3. һ�S�ͺ������νY���������c����LCE���ӌ��տs׃�ε��Pϵ��
�@�N����ܛ�w�C��������Һ�������w���ϣ�LCE���Ŀ��؏�׃���ԣ����F������εČ��r�ɿ��ؘ���ͬ�r��ͨ�^������ƽ���������ı��ӌӣ������˽Y������Ч���ȣ���Q��������������b�û�ܛ�w�C�����y�Գ����^����d��ȱ�c��ԓ��о��w�F��ܛ�w�C���ˏ�����׃��ģʽ������׃�εİlչ����δ����ͨ�^ʹ�ø����M�����ܲ��ϡ������ܵľW������s�Ŀ����·��ԓ�OӋ���������h���˙C�f�������S�@ʾ������ʽ�ɴ����O��ȑ��È�����

�D4. ����׃�Ρ��ٿ���������ص�չʾ��
������ܛ�w�C�������؞�33g��
Փ�ĵ�һ���ߞ���������WԺ��ʿ���о��T���沩ʿ��ͨӍ���ߞ�Chiara Daraio������
朽ӣ�https://robotics.sciencemag.org/content/6/53/eabf5116
���d��Robotic surfaces with reversible, spatiotemporal control for shape morphing and object manipulation
- ���K��W���ս����n�}�M AFM�����w�w���ӳ�����Һ�������w 2025-06-24
- �eϦ���၆��W�����F� Adv. Mater.: �аl��ģʽ����׃ɫҺ�������w�� 2025-06-16
- ̹���״�W����ˬ��ʿ Adv. Mater.: �o�����l�� - �u�IҺ�������w��������������� 2025-05-31
- ��������������/鐾��`�F� JMCA: ��������/ʯīϩ�����z�ķּ���Y�����F���W��늴����μ��� 2025-06-19
- �㽭��W����ƽ�����n�}�M Adv. Sci.�����á�����֧�ܡ������ھ�������Ĥ�Ș����ЙC���ӿ��ق�ݔͨ�� 2025-06-01
- �Ĵ���W���Ƃ��F� Adv. Mater.�����ԟ���o���������Mչ 2025-05-28
