��������ܛ���ϵ�ܛ�w�C���˾��к͂��y늙C�ӵęC������Ƶĸ�֪���̼����a�����������О��������ͬ�r���к������w����ƥ������W���ܣ����Ѻõ��˙C�������棬�A���ܸ��õ�ģ�M��Ȼ��ĸ��������\��ģʽ��������ܵ��ˏV�����Pע���S��������lչ���˂������Խ��Խ�ߵ������������܉Fܛ�w�C�������О�İ����ؘ���һ����Ҫ�İlչ���IJ��ϽǶȣ����Ю��|�Y���������nj��F�ӵ��P�I�����|�Y������ͨ�^���W���ķ�ʽ���̶���һ���γɣ����y��׃���@����ܛ�w���������О��^���һ�����y�Ը������H�����M�����¾���������������ˆT������һ���̼��µĿ��淴���������F�������Į��|�Y�����ؘ���ʹͬһܛ�w�C�����܉�չ�F��ģʽ���О顣��Ŀǰ������ؘ��^��ͨ����Ҫ�ߜؼӹ����D������������W̎���������O��ȏ��s���������H�����ܵ������ơ�����ڜغ͗l�����Fܛ�w�����͙C���˵ı���ؘ�����һ�����
ᘌ��@һ���}���|�A��W�w�S���ϸ��ԇ������c��������������ڈF�����ģ�K����˼������˺��^�������ϽM�b (Macroscopically discretionary healing-assembly)���ԣ����ò����������ԣ����F��ܛ�w�����͙C���˵ı�ݸ�Ч�ؘ������P�ɹ��ԡ�A New Strategy of Discretionarily Reconfigurable Actuators Based on Self-Healing Elastomers for Diverse Soft Robots�����}���l���ڲ��όW�I����H�����W�g�ڿ������M���ܲ��ϡ�(Advanced Functional Materials)���|�A��W���όWԺ�Tʿ���Ǽ����Փ�ĵĵ�һ���ߣ���ʿ�������R��Փ�ĵĹ�ͬ��һ���ߣ�������������ԓՓ�ĵ�ͨӍ���ߡ�
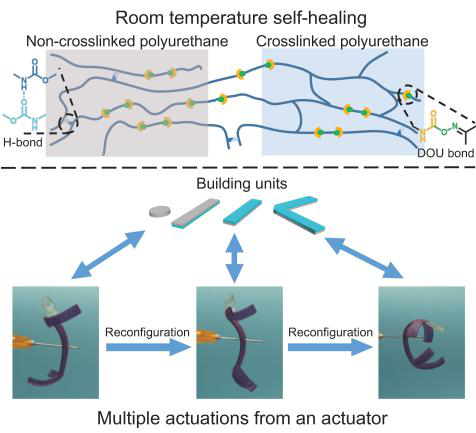
�D1. ���������Ͼ�뿰������ϵĺ��^�������ϽM�b�Ŀ��ؘ�ܛ�w�C���˵Ŀ��w�OӋ
���������ڈF��L�ڏ������w�о���������������Ϗ����w�I��ȡ��ϵ���Mչ (Nat. Commun. 2021, DOI: 10.1038/s41467-021-24680-x; Natl. Sci. Rev. 2021, 8: nwaa154; Adv. Mater. 2019, 31: 1901402; Adv. Funct. Mater. 2019, 29: 1901058; Sci. China Mater. 2021, 64: 1791; Mater. Chem. Front. 2019, 3: 1833)���e���ڄӑB��뿰��������w�����_չ���^��ϵ�y���о� (��Ո�C����Chinese J. Polym. Sci. 2021, DOI: 10.1007/s10118-021-2625-9)���������Դ˞���A�OӋ����ܛ�w�C���ˡ�ͨ�^���ƽ��ȱ���Ƃ��ˌ��܄����в�ͬ����Û�ȵľ�뿰���ģ�K��ģ�K֮�g�������������ԣ����ԽM�b�Y�Ϟ鮐�|�ͺϽY����ͨ�^��ͬģ�K�������ɵĽM�ϣ������`������܄��̼������О������ܛ�w�C���ˣ��@Щ�M�b�ęC�����܉�����ü��ɺ���ģ�K�����������ϽM�b�����������µ����О��ܛ�w�C����(�D1)��
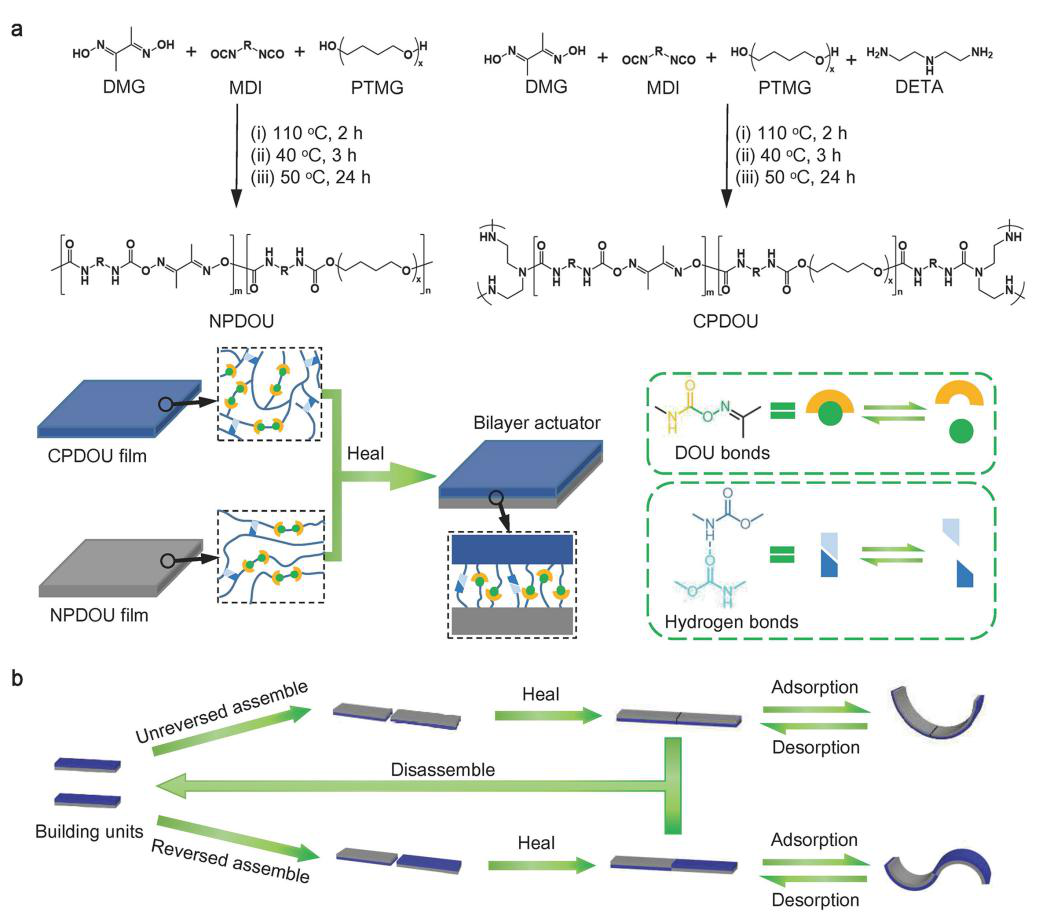
�D2. �����Ͼ�뿰��������OӋ�����^�������ϽM�b����չʾ
�D2���p�������������U����������ܛ�w�����Ę������ؘ��^�̡����ľ�뿰���(CPDOU)�;��Եľ�뿰���(NPDOU)�o�p���Ϟ�һ�����|�Y�����ӑB뿰����I�ڮ��|�Y������̎�ؽM���x�����������õĽ���Y�Ϗ��ȡ���ͬ���ȵľ�뿰������܄��е���Û���ʺ���Û�Ȳ�ͬ���Ķ��p�ӽY�������������܄��̼��°l�������׃��(�D3)������ѭ�h����չ�F�˳�ɫ�ķ����ԡ�ͨ�^�{���ɌӵĎ΅���������Ч�{���������܄��̼��µ�׃�γ̶ȡ�

�D3. �p�������������ܼ����ý���Y�ϡ�
���������������nj��F���^�������ϽM�b���Ե��P�I�����߿����������p���������Д��ԭλ���Ϻͷ��D���ٌ������σɷN�M�bģʽ���������������ܵ�Ӱ�(�D4)�����ڔ�����֮�g�ĄӑB뿰����I�͚��I�����ã������ڃɷN����ģʽ�¾�չ�F�����ٵ����ϡ����Ҝ�����15 min���ڃɷNģʽ�����Ϙӗl��չ�F�������õ����W���ܵĻ֏ͣ����Ա����쵽����200%�����l�����ѡ�

�D4. �p���������Ҝ�������
�������Į��|�p��������ԭ��ͬ�|��뿰�����ģ�K��ͨ�^��ģ�K�Ĕ������Π�����еĺ��νM�ϣ����ߘ�����һϵ�Ђ��y�����췽���y���Ƃ�ľ��в�ͬ3D���О��ܛ�w�C���ˣ��D5����

�D5. ģ�K�����ϽM�b���Ԙ������О������ܛ�w�C����
��������չ�F��ʹ�ú��^����ü����ϽM�b���ԁ팍�Fܛ�w�C���˵��ؘ����D6�������ȏ�һ���L�l����������l���{��ģ�K�ĽM�Ϸ�ʽ��ʹԓ�����܉�չ�FC�Ρ�S�Ρ����������N��ͬ����ģʽ��Ȼ��������ܛ�w�C���˞�����ͨ�^��׃���ֱۡ��������w���͡��ȡ�ģ�K�����У�����ͬһ�܄��̼��µ���׃���܉��ڹ��ˡ��������٤����ʽ���N�˄�����ГQ�����˸�׃���О飬ԓ����߀�܉��x������һЩ�ض����ܣ��������ߌ��H�l�����Ώ���׃�ε��L�l�������ؘ���һ���ı�ʽ�C���ˣ����܄��̼���ԓ�C�����܉��e������1.5�����X�塣ԓ�����Ќ������IJ�⼰ģ�K���ٽM�b�^�̺����`�����Փ���v�����Ԍ��F�o���ؘ���ͨ�^�������OӋ��������������ģʽ����ܵ�ܛ�w�C���ˡ�

�D6. ܛ�w�����͙C���˵��Ҝر���`���ؘ�
ԓ�������ڲ����������ԣ������һ�N���^�������ϽM�b���ԣ�ͨ�^����ģ�K�IJ��M�b�������Ҝ����Fܛ�w�C���˵��`��Ę������ؘ��������^�̟o�������̼����e�O�䣬�Ҝ��¿ɷ��Ͷ���M�У�չ�F��ǰ��δ�еı���ԡ����ڲ��ϵı����������Ԍ��Fܛ�w�C�����ؘ���˼·����ǰδҊ�����ԓ���Կ�����չ�������d������������ϲ��ϣ�����һ��ܛ�w�C���˵��OӋ�������ṩ�µ�˼·��ͬ�rҲ�U���������ϲ��ϵđ��÷�����
ԓ�����@���ˇ�����Ȼ�ƌW�����Ϻ�����Ȼ�ƌW���𡢖|�A��W��־Ӌ�����Ŀ�Y����
ԭ��朽ӣ�https://doi.org/10.1002/adfm.202008328
�F���퓣�http://pilab.dhu.edu.cn/zyou/main.psp
- �����������܈F� Adv. Sci.���ܿ�܉���l�ĭh������� 2025-04-30
- ������܊��/�܊μ���ڈF� Adv. Sci.����ܭh����֬�о������Mչ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ��������ʎ���������ܛ�w�C���� 2024-10-26
- ���ڼ��g��Wʷ���|�� Carbon������ʯīϩ-�{���w�S�؏ͺϱ�Ĥ�����ޏ͑�׃/����pģ���������OӋ���ڿɴ��������O�y�đ��� 2025-05-28
- �n��KAIST���w�������������\ Macromolecules���t���dž��l��ˮ����������ͻ�� 2025-04-29
- ����������W����� Nano Energy�����ڏ�����Y�������Թ�����w�����Ͻ�늏����w���� 2025-04-22
- �|�A��W������/�Ϻ������w�����~�Է塶Nat. Med.�����ٰl��Nat. Commun.���������ϲ��ϸ����w���t�W���� 2021-07-24
