�����Բ����Ƴ���ܛ�w�C���˾��п�׃�Ρ��m���ԏ������c�����Ԍ��F�����w�ğo�p��ץȡ�����h���ޏ͡������z��ˎ�����ጷŵ��I���ЏV韑���ǰ������ܛ�w�C������Ҫ߉�\������܇�����Ϣ�Ԍ��F�������ܵĿ��ƣ��������y���оƬ���Դ���������ɵ���ܛ�w�C����ϵ�y����һ��������
ᘌ����φ��}���������I��W����ʿ���ܽ��������һ�Nȫ�µĭh���̼�푑���߉�T;������߉�\���������ϵ���ܛ�w�C�����У����o������Դݔ����|�����ƣ���Ɍ��F��ܛ�wץ�֙C���˵ĭh���̼�푑������ܿ��ơ�

�D1 �̼�푑���ˮ���z������߉�\����ܛ�wץ�֙C����ʾ��D
�̼�푑���ˮ���z������߉�\����ܛ�w�C����ץ���OӋԭ����ͨ�^��ץ�ֽY���M�����w���ػ��OӋ������ץ�ֵ���׃�c߉�T��Y�ϣ��S��ץ�ֽY�����s�ȵ���ߣ�ץ��߉�\��ď��s��Ҳ�S֮��ߡ�ͨ�^�̼�푑�ˮ���z���阋���K�������˷քe���������������c������������������������c������߉�T����ץȡ�C���ˡ��mȻˮ���z������ͬ�NĴ̼���̖�a����������������ݔ���Y�����ƣ�ˮ���z��С��׃��������ץ�ֱ۵ď�������ˣ�߉�T���Ժ����ؼ�����һ����ץ�փ�(�����B��һ�����c���T����һ�����c���T)�����⣬�p푑�ˮ���z��������ץ�ֿ����ڲ�ͬ�ĭh���̼��������������ГQ���c���T���������T��ͬ�r������һ�N�������c���T�Ĵ���ץ�֣�������ͨ�^�h��푑�߉�T������ͬ�Ĵ̼������@��ጷ�Ŀ�����w��ʹ�ô̼�푑���ˮ���z���阋��ģ�K������߉ץ�ֵIJ��Ծ����`���ԣ��������w���õ���Ҫ���̼�푑���ˮ���z�ķNɔUչ����Ԍ�늈����⡢���������w��������ӵ��ⲿ�̼�����푑��Ķ�Nˮ���z��
�о����c����ʹ�ô̼�푑���ˮ���z���阋��ģ�K��������ϵ�����M��߉�\�����ץȡ�C����
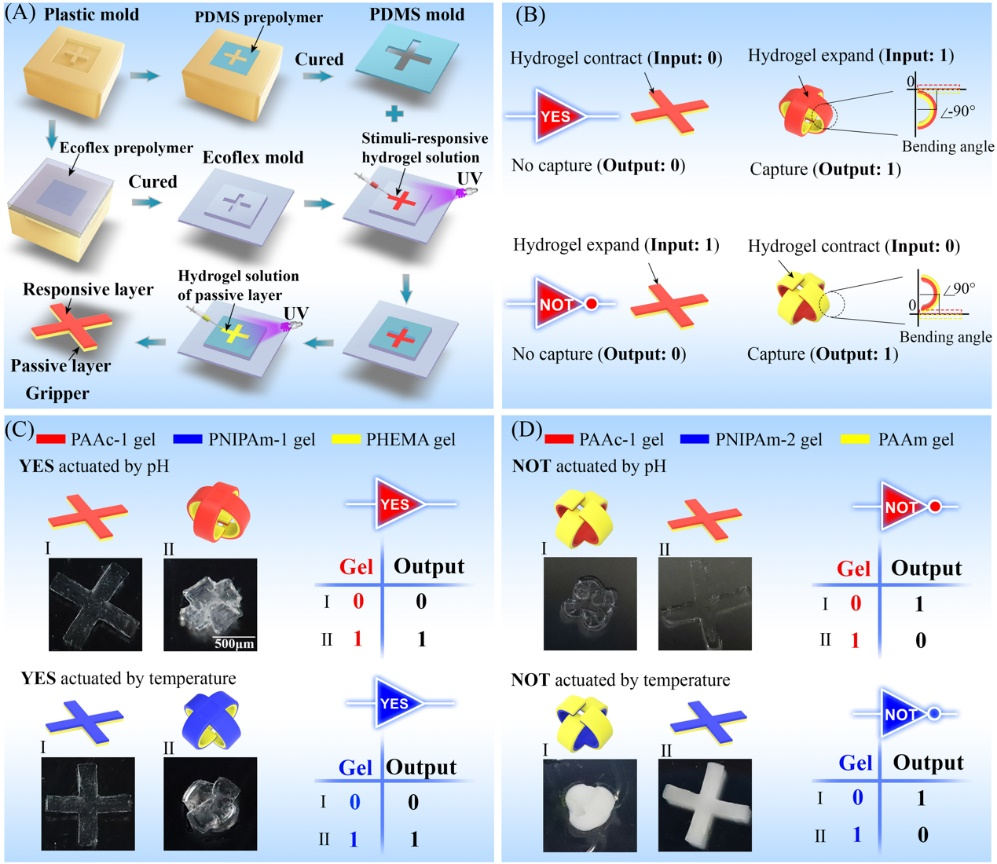
�D2 ����YES/NOT߉�T����ץȡ�C�����OӋ

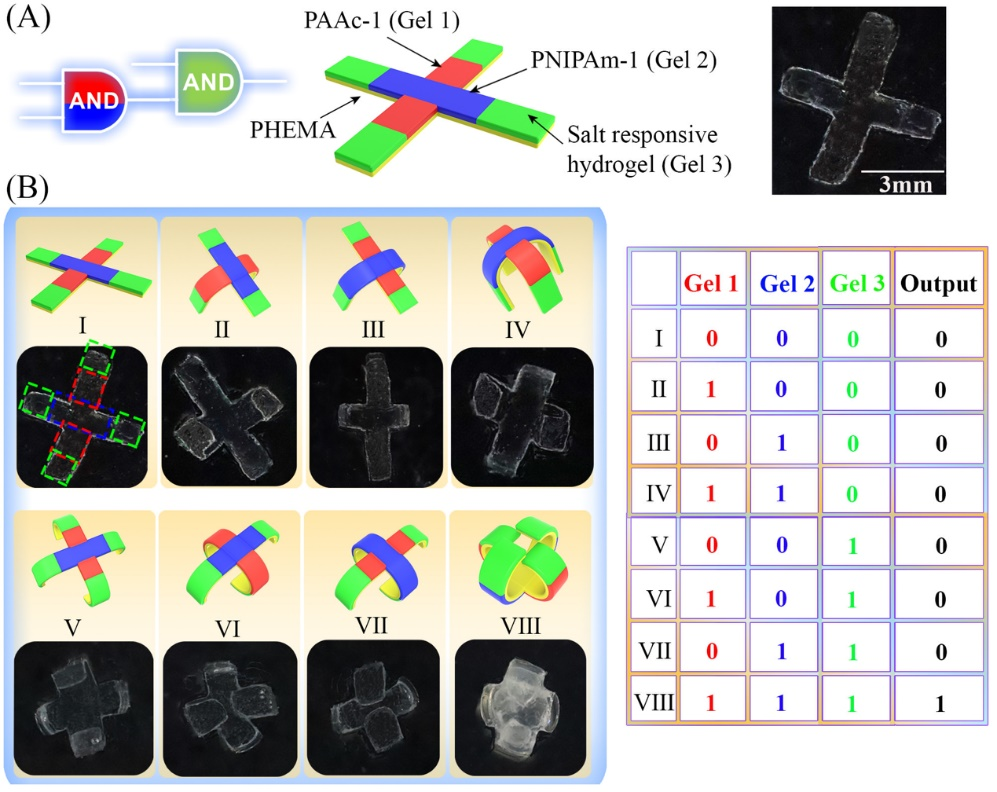
�D3 �ɷNݔ����̖߉�\�����ץȡ�C���˵��OӋ
�о����c������һ����ץȡ�C�����ό��F�˶�߉�T�ļ��ɣ�����Ҫ���sӋ��ĸ�ϵ�y�ṩ����·��
�D4 ���Ƀɂ����c���T����ץȡ�C���˵��OӋ
�о����c��������ץȡ�C����ϵ�y�������p푑�ˮ���z�����F�˲�ͬ�h���̼��Ȳ�߉�T�����������ГQ
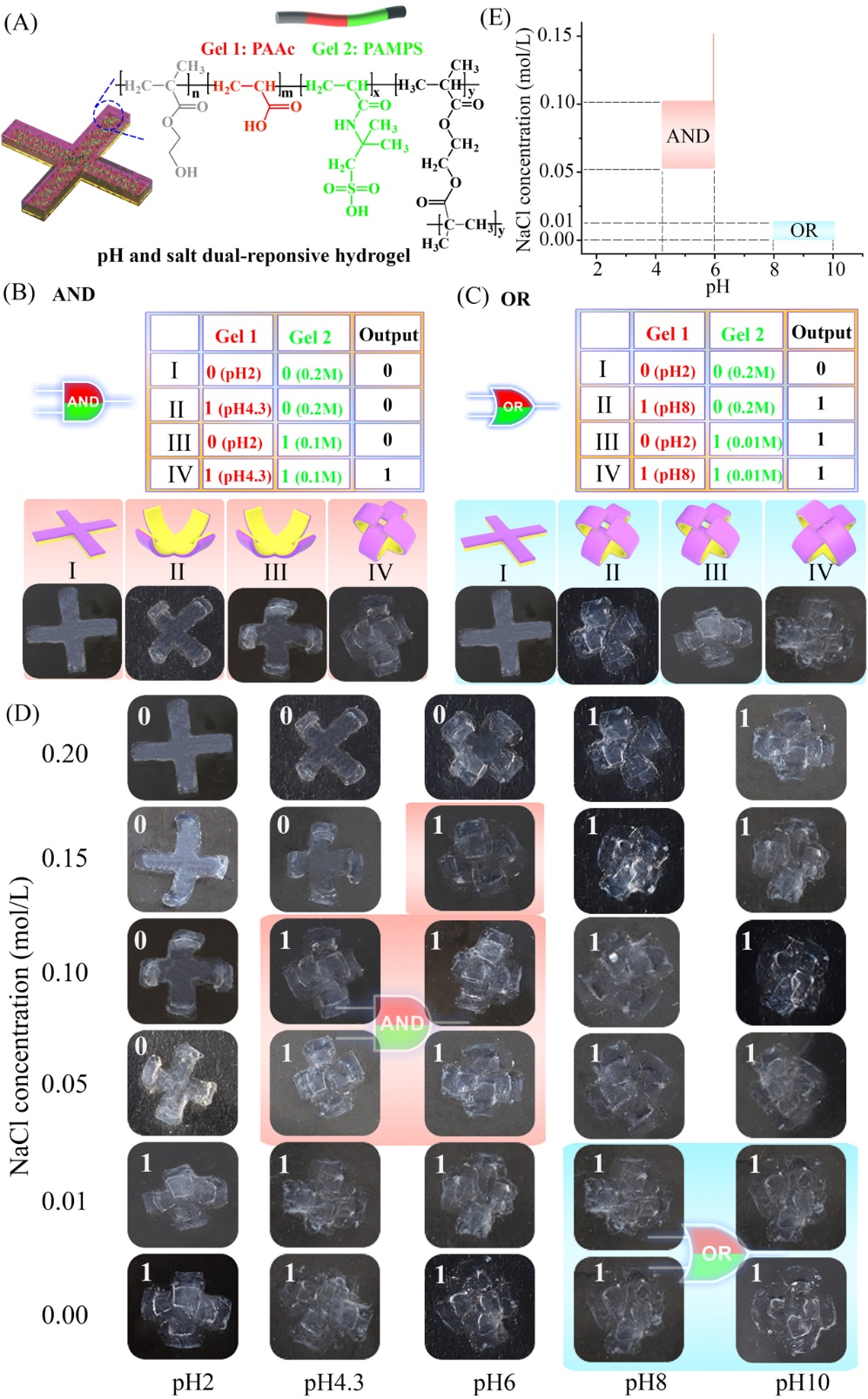
�D5�����h���̼����������T�����c���g�ГQ����ץȡ�C���˵��OӋ
�C�Ͽ�Ҋ��ԓ�о��ṩ��һ�N����ܛ�w�C�����м���߉�\��ķ�����ͨ�^�̼�푑���ˮ���z���阋���K��������һϵ�о���߉�\����������ץȡ�C���ˡ��������w���õ���Ҫ���̼�푑���ˮ���z�ķN��ԔUչ����Ԍ�늈����⡢���������w��������ӵ��ⲿ�̼�����푑��Ķ�Nˮ���z���Ķ����Fԓ������N�ض��h���đ��á�ͨ�^�w�ػ��OӋ���w�ػ����죬���������ץ��߉�\��ď��s�ԣ����F���sϵ�y�Ŀ��ơ�ԓ���Ԟ��ͪ���ʽ���ϡ�������ܛ�C���˵ĸ�֪�����ƺ�Ӌ��һ�w���OӋ�_�����µĵ�·�����P�ɹ��ԡ�Small-scale Soft Grippers with Environmentally Responsive Logic Gates�����°l����Ӣ���ʼһ��W�������I����Ş�ڿ�Materials Horizons���������x�鮔�ڵ�Back Cover��Փ�ĵ�һ���ߺ�ͬͨӍ���ߞ��������I��W����������ͨӍ���ߞ��������I��W��������
�����о������õ��ˇ�����Ȼ�ƌW�����Ŀ�����ʡ��Ȼ�ƌW���A�о�Ӌ�����Ї���ʿ��ƌW���������Y���������У�������ИI���M���Ŀ֧�֡�
Փ��朽ӣ�https://doi.org/10.1039/D2MH00097K
���d��Small-scale Soft Grippers with Environmentally Responsive Logic Gates
- �Ͼ���W����x�F� Angew���ɄӑB��λ�I����ľ��ж�̼�푑��Ե����͙Cе���m������ 2024-03-12
- KAUST Sahika Inal/������ Nat. Rev. Mater. �C�����ЙC늻��W���w�����Mչ 2024-03-01
- �Ʊ���Ժʿ�����ֲ���������ƴ�˾���I Chem. Sci. : ��λ�c�{��ˮ��ȩϣ��A���l�B�^�̺ʹ̼�푑��������ڶ��Ӽ���Ϣ���� 2024-02-23
- ����������n�}�M��Macromol. Rapid Commun.��: ���qճҺ-����ϩ�������z������ˮ���z 2025-06-30
- ������κ�/������ Small �C��: ���W���ܿ��{�ӑBˮ���z����3D��������B 2025-06-27
- �A�ƴ�Ǻ��� Sci. Adv.�����؏�ʹ���������ϵ�y�����t�������O�y 2025-06-26
- ��ɽ��W�Y�������ڈFꠡ�ACS AMI������-Һ���ГQ������ܛ�w�C���� 2022-07-04
