������ܛ�w�C�����܉�ͨ�^�o���ň����h�̿��Ƶķ�ʽ���F(xi��n)���s�IJ������������t(y��)�W�I����ЏV���đ���ǰ����Ȼ�������ڹ��w���ϣ����磬���z��ˮ���z�ȣ��Ĵ�����ܛ�w�C���������^�õĄ��Ⱥͷ�(w��n)�����Π��������׃�������ܵ��A���OӋ���Π����ƶ��o���ژO�˪Mխ�ĭh(hu��n)�����`���\�ӣ����֮�£�����Һ�w���ϣ����磬�����w��Һ�B(t��i)���ٵȣ��Ĵ���ܛ�w�͙C�����܉��Ԍ��F(xi��n)��߶ȵ�׃�Σ����s�ܵ��Π��(w��n)�������ơ���ˣ��_�l(f��)һ�N�܉F(xi��n)���ٹ�-Һ�ГQ�����ж�ܵĴřC������Ȼ��һ������(zh��n)��
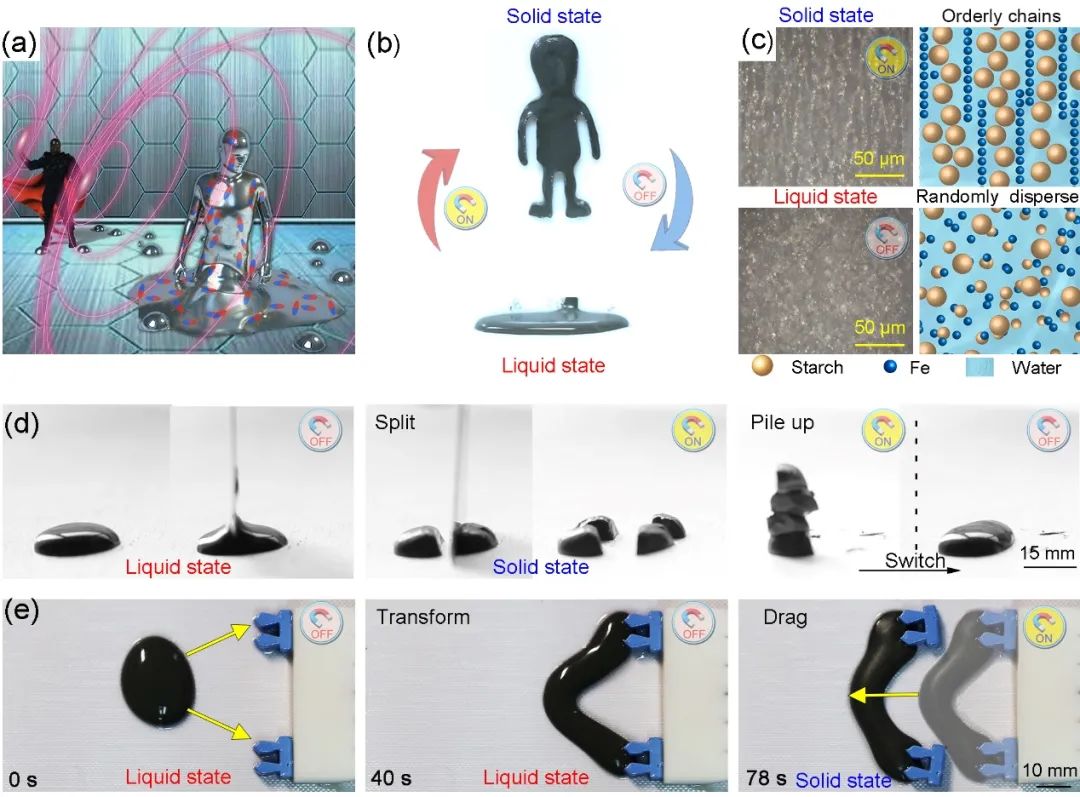
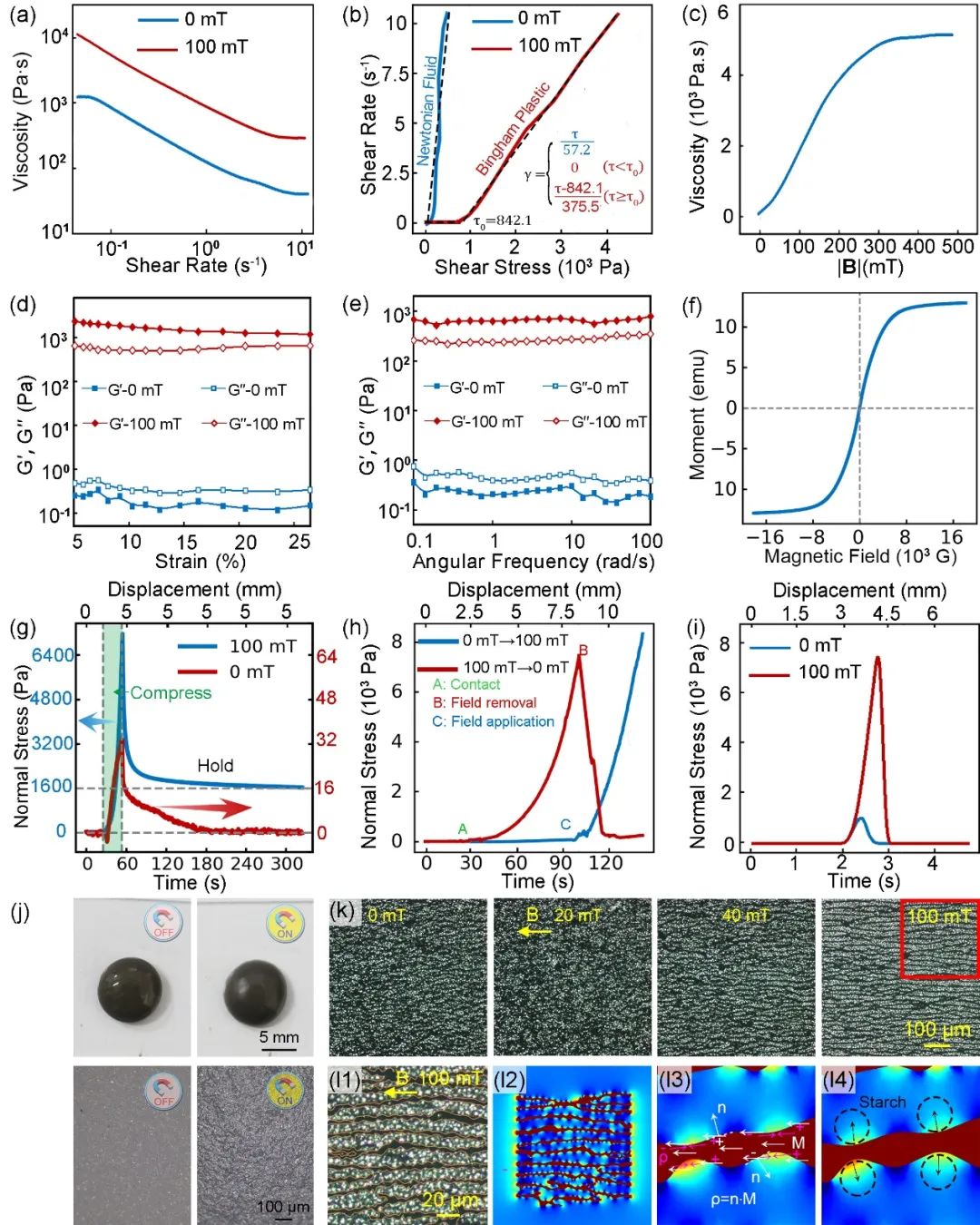
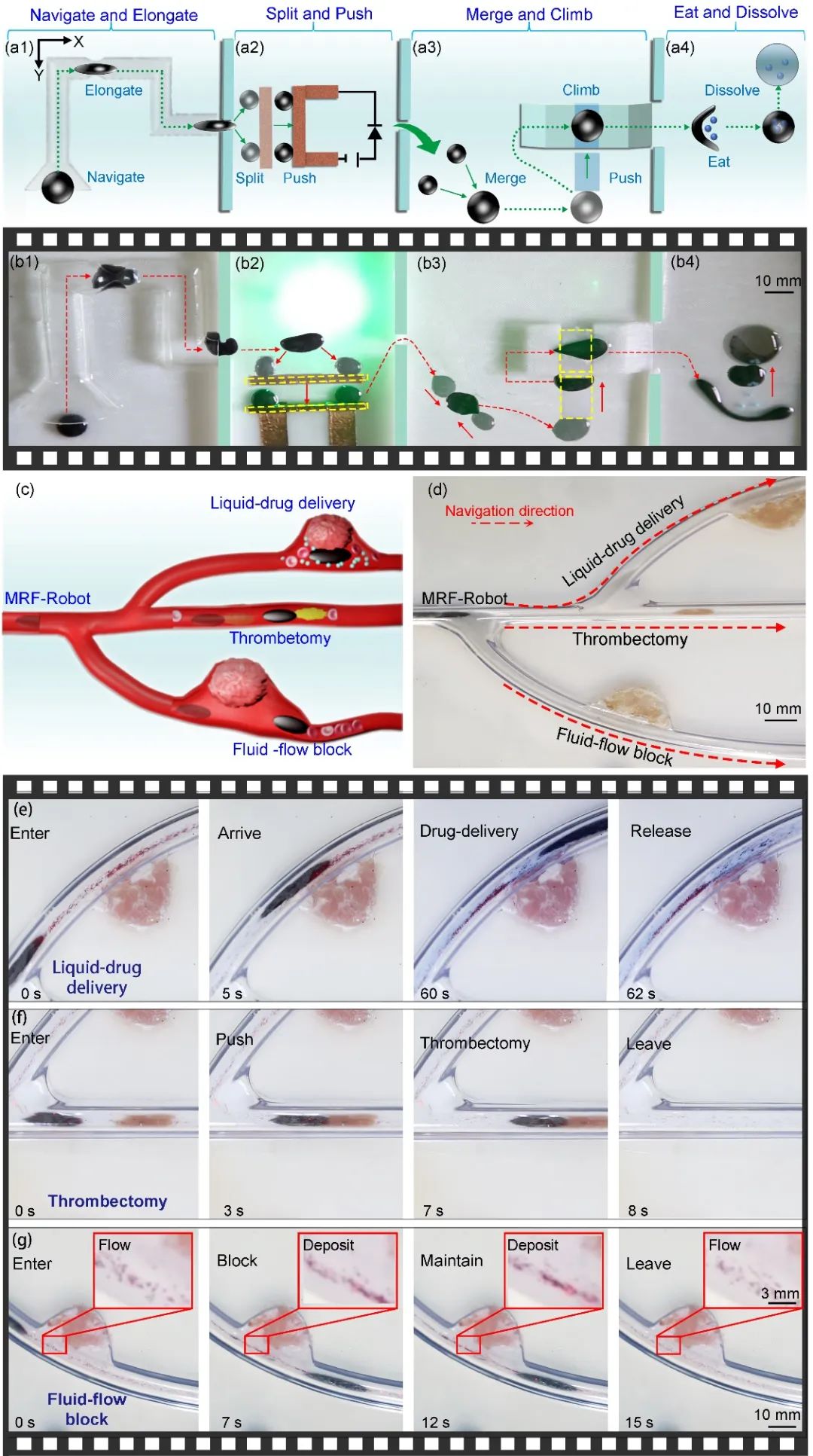
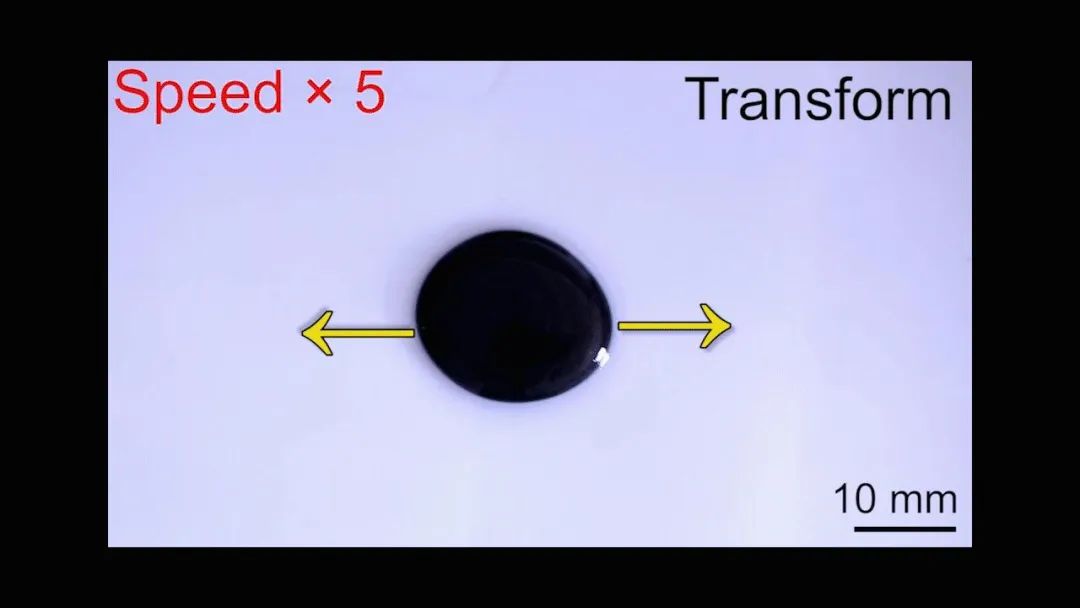
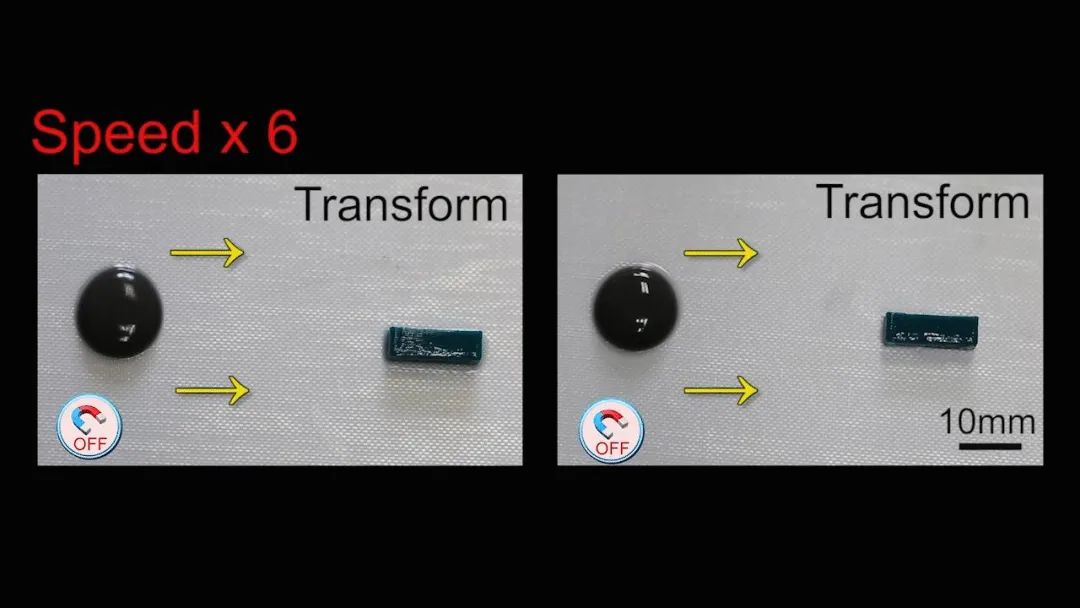
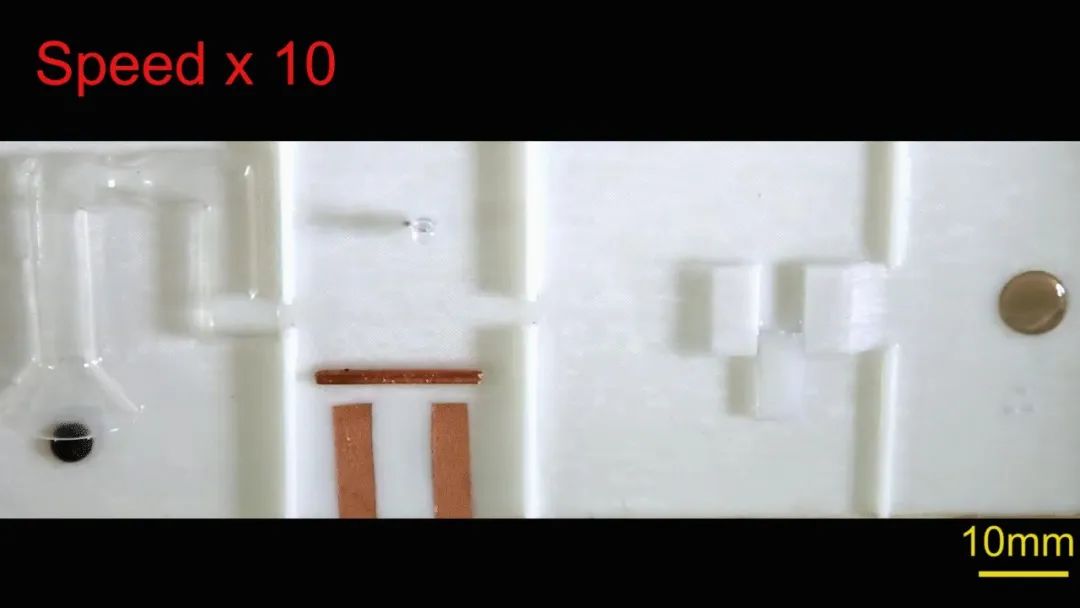
���ڣ��ܺ��R�]��Ƭ���K�Y��2����T-1000�C���˺͡�X-��(zh��n)�������f�����Ć��l(f��)����ɽ��W�Y�������ڈF������һ�N���ڴ���׃Һ�Ĺ�-Һ���ГQ������ܛ�w�C���ˣ�����׃Һ�C���ˣ����D1a���������о������˴���׃Һ�C�����ܴň����ƵĹ�-Һ�ГQ���ܡ����W�����Լ��^�Y�����D2�����l(f��)�F(xi��n)����׃Һ�C���˿��Ԍ��F(xi��n)�����ň�����0 mT���µ�ţ�D���w��Һ�B(t��i)���͏��ň�����100 mT���µ��e�hķ�����w���̑B(t��i)��֮�g���ɡ����ٵ��D�Q���D1b��������չʾ������ڹ�-Һ�ГQ�����µ��������Π(w��n)��������ճ�����w���О顣Һ�B(t��i)����׃Һ�C���˿����ڸ��ݶ����ň��������F(xi��n)��׃�Ρ�ƽ��(w��n)������ԭ�ط��ѡ��ںϺ����S�ȶ�N�О飻�̑B(t��i)����׃Һ�C���˿����ڸ��ݶȏ��ň������£������Π���ؘ��Ŀɿ��\�ӺͶ���;�����w����(�������w�������ƺ����D)���D1e�������⣬ͨ�^�ڹ̑B(t��i)��Һ�B(t��i)֮�g���ɵ��ГQ�������µĴ���׃Һ�C���˿����ھC�ψ������B�m(x��)�C�ӵ���ɹܵ��������ޏ��·�������Լ��ռ���ȶ�N�΄գ������F(xi��n)Ѫ��ģ���е�Һ�w�oˎ��Ѫ˨��������w���������ȹ����О顣���D3�����@��о���������әC���˵��OӋ�����Լ������_�l(f��)�_�����µ��о�˼·��������Ĵ���׃Һ�C����ͨ�^��ȫ�ſصĹ�-Һ�ГQ�����F(xi��n)�˹��w���әC���˺�Һ�w���әC���˵ă�(y��u)�ݻ��a���Uչ�����������t(y��)�W�ϵđ���ǰ����ԓ�����ԡ�Solid-Liquid State Transformable Magnetorheological Milli-Robot�����}�l(f��)���ڡ�ACS Applied Materials & Interfaces������ɽ��W�����t(y��)�W���̌WԺ��ʿ���־�i�ʹTʿ�о����R������Փ�ĵĹ�ͬ��һ���ߣ���ɽ��W�����t(y��)�W���̌WԺ�Y�������ڞ�Փ�ĵ�ͨӍ���ߡ�
ԭ��朽� https://pubs.acs.org/doi/10.1021/acsami.2c05251
- ���������ƾ��_�n�}�M��ACS AMI��: �����B(t��i)�����͙C���� 2024-01-25
- �Ї��ƴ����d���Fꠣ���ӳ����ͬ��ܛ����׃�����w�ӑB(t��i)�����О���������ģ�� 2023-12-27
- ˹̹���w�ǿɽ��ڡ�Nat. Commun.�������w��(n��i)���w�ٸ��� - �o���ɗ���ˎ�C���� 2022-06-17
- �͵���W���^�S�����о��T Adv. Mater.��һ�N���г���푑��ʹ����ǶȵĹⲨ�������� 2025-02-20
- �A�ƴ��������ڡ���ȫ�����ڈF� Nat. Commun.���ʹſ��z�ҙC���ˌ��F(xi��n)��ģ�B(t��i)푑��c��ܼ��� 2024-03-12
- �A�����������Ľ����n�}�M Adv. Funct. Mater.���Լ{���w�S�؏ͺϲ�������3D��ӡ�{�ϲ���ֱ��ӡ�߷ֱ����ͽY�� 2024-01-17
- �����������܈F� Adv. Sci.���ܿ�܉���l(f��)�ĭh(hu��n)������� 2025-04-30
