��ֲ��ď��s׃�κ��\���������������c�M�����P��Ҫ��������׃�β��ϡ�ܛ�C���˵��OӋ�_�l�ṩ���`�кͷ�����ˮ���z�c����ܛ�M�����и߶������ԡ���N����푑��ԣ��ǘ���ܛ������ܛ�C���˵�������ϡ����ڌ������wϵ����ԭ�����J�R�Լ�ˮ���z�ӹ����g��ͻ�ƣ�ԓ�I���ڽ�ʮ��õ��˿��ٰlչ���㽭��W�������������F������ڡ�Accounts of Chemical Research���ϰl�����}�顰Programmable morphing hydrogels for soft actuators and robots: from structure Designs to Active Functions���ľC��Փ�IJ����x��������£����Y�˽������ˮ���z�ɿ�׃���c���zܛ�w������ܛ�C�����I����о��Mչ��

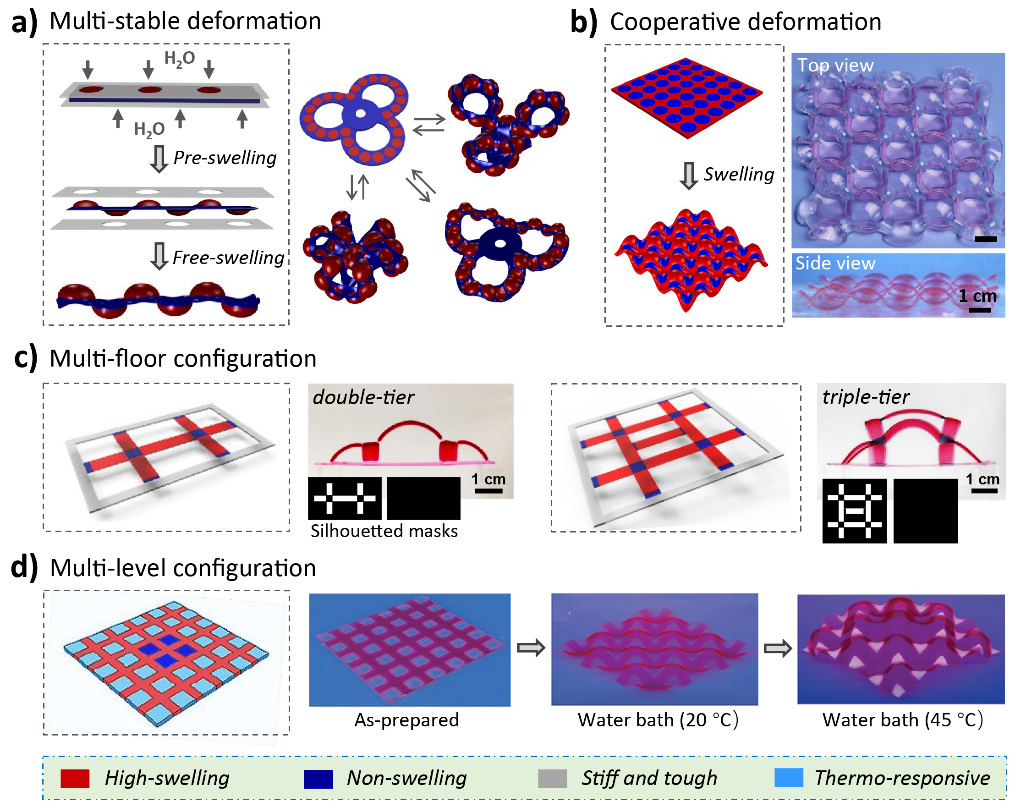
ܛ������ܛ�C���������������Č��F���c�߷���ܛ���Ͽɿ�׃���������P��ͨ�^����ƽ�桢��ȷ�����ݶȽY��������ʹˮ���z�����̼��®a���Ǿ�һ���w�e��Û���տs���M���a�������������l���������ۯB��Ť�D��������ģʽ�Ŀɿ�׃�Ρ�ͨ�^������Ԫ�įB�ӣ������γɏ��s�����S���͡�ƽ���ݶ��Y���������������׃�������p���B����������ˮ���z���F�ව�B�����ṩ���µ�;��������������������F����þֲ��A��Û�ķ����{�ض�����Ԫ����������ʹͬһˮ���z����ͬ�l���«@������N��ͬ�Ę��͡��ں���������ƽ���ݶȽY����ˮ���z����������Ԫ������׃���Ӱ����ʬF�fͬЧ�����Ķ��l�γ�����������Ę�����

�D1. ����M�����ɿ�׃�����\��������
�D2. ����ƽ���ݶȽY����ˮ���z�ąfͬ׃���c�ව�B׃����
��׃��ˮ���z�V���������t����е��ܛ�������I����Ȼ��������ˮ���z���W�����^�������ݔ�������^���ޣ��������ٶ��^����ԓ�F�ͨ�^3D��ӡ�ߏ�ˮ���z���Ƃ��˼��ݔ�������푑�������ܛ�������OӋ���ߏ���ˮ���z�ܠ�ץȡ�������ι�ץȡ��ͬ�Π�����w��������ˮ���z��������ͨ�^����׃�����F�������Ѱlչ������׃��ģʽ��ܛ�������OӋ�c�����ṩ�˿��g��

�D3.ˮ���zܛ������
��׃��ˮ���z���OӋ�����\�ӹ��ܵ�ܛ�C�����������wϵ�����y�c������Ό�ˮ���z��������������s׃���D�����B�m�������\�ӡ����������ԭh���̼���ʹ���������Ɔ����\�ӡ��OӋ�����Q���Y���nj��Fˮ���z�����\�ӵij��ò��ԣ����\�ӷ����һ���o�����F�����\�ӡ�ԓ�F������ӑB����ˮ���z�ֲ�׃�β�ͬ���{���c�����Ħ���������F�����С��D����ӵ��\���^�̼�����ĄӑB�{����

�D4.�ɡ����ߡ���ˮ���z��ܛ�w�C���ˡ�
��׃��ˮ���z�������t�W��������ӵ��I��Ҳչ�F�����������Ý��������ǣ�ˮ���z�wϵ�c�����w��������������������������⣬�䑪���I�������Mһ����չ��߀횿��]��ȫ�����������Ȇ��}��
ԓ���°l����Accounts of Chemical Research��ԓ�����õ��ˇ�����Ȼ�ƌW����ί���Y����
������Ϣ��
Dejin Jiao, Qing Li Zhu, Chen Yu Li, Qiang Zheng, Zi Liang Wu, Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions, Acc. Chem. Res. 2022, DOI: 10.1021/acs.accounts.2c00046.
https://pubs.acs.org/doi/10.1021/acs.accounts.2c00046
- ���������x�����ڈFꠣ������x����λ�����ߏ��ȺͿ�׃��ˮ���z 2020-09-22
- ������W�̸��������n�}�M Chem. Mater.���������ΑB�l�����l�ľۺ��ﱡĤ3D�ɿ�׃�� 2024-04-11
- �㽭��W�������������F� Angew�����D�ň��o���Ƃ���ж�푑��ԡ����sȡ��Y���ļ{�ͺ�ˮ���z 2022-06-27
- �㽭��W�������������F�Adv. Sci.���D����늈��o���ď��sȡ��Y��������ˮ���z�ɿ�׃�� 2021-10-29
- ̫ԭ������W�����ֽ��� Adv. Sci.: ������z�x�ܷ�����ģ�ԱO��ָ�����w 2025-07-02
- ����������n�}�M��Macromol. Rapid Commun.��: ���qճҺ-����ϩ�������z������ˮ���z 2025-06-30
- ������κ�/������ Small �C��: ���W���ܿ��{�ӑBˮ���z����3D��������B 2025-06-27
