���x�C���˿����M�и�Ч�������Ƅӣ����пɲٿ��Ըߡ�֧�֟o��ͨӍ�����c����܊�ɲ졢�h���O�y���b�м��g�Լ������t�W���̵�ǰ���I���ܵ��о��ˆT�ďV���Pע������Ȼ�����x�Ć��l�����ڸ��N�OӋԭ�����Ӳ��Եķ����C���˱��ɹ��Ƃ䣬��������ò������x�ęC���ˡ��������M�\��ϵ�y�ęC���ˡ��w�eС�ɵ��¸���ܛ�w�C���˵ȡ����磬�[���x��rove beetle������ͨ�^��β��ጷŻ��W���|���ɴ��γɵı��揈���ݶȿ��Ԯa���������x���Ƅ�������ˮ�������M�[���x���c���y�ęCе�Ӳ��Բ�ͬ���ڿ՚�-ˮ�����MarangoniЧ���Ӳ���Ҫ����Ĺ��ܲ��ϻ��{�Y�����@�N�ӷ�ʽ����ʹ�ÙC����������ֱ���D�������ɟo˨�\�ӡ���ˣ����_�l���x�߶���MarangoniЧ���ӵęC���˷�����о�ĝ�����
MarangoniЧ���ӵı��|�ǘ������揈���ݶȣ����揈�����Һ�w�������ڱ��揈��С��Һ�w���܇�Һ�w������������ˣ�Һ�w�����Ư������������揈����ķ����Ƅӡ������@һԭ�����ѽ��ɹ����Ƃ����������MarangoniЧ���ͻ��WMarangoniЧ���ӵęC���ˡ���������MarangoniЧ���әC���ˣ�����ͨ�^����߹���߾ֲ��Ĝضȣ���׃�ֲ��ı��揈�������F�C���˵��Ƅӡ����ڻ��WMarangoniЧ���ӵęC���ˣ����Ƅ��^����һ���ӑB���^�̡����Wȼ�ϣ��磺�ƾ������X��ȣ����d�ڙC�������w�ϣ���uጷŮa�����揈���ݶȣ��әC���ˮa������[���x�����Ƅӡ������ڹ��MarangoniЧ�������WMarangoniЧ���o�����D�Q�@һ�^�̡���ˣ����WMarangoniЧ����푑����죬���ҿ��Ԯa�����������������MarangoniЧ���ӵęC���˾��кܴ�ĝ�����Ȼ�������WMarangoniЧ�����w�Ӿ��Џ��s�����wģʽ�����Ƅӵķ������S������_���ģ��@ʹ�û��WMarangoniЧ�����^����Һ�w����a���������Ͳ��ɿصĶ��S������Ŀǰ�����ڻ��WMarangoniЧ���Ӽ��g���ƙC���˴��ھ�����𣬇������������ڙC���˼��g�I��đ��á�
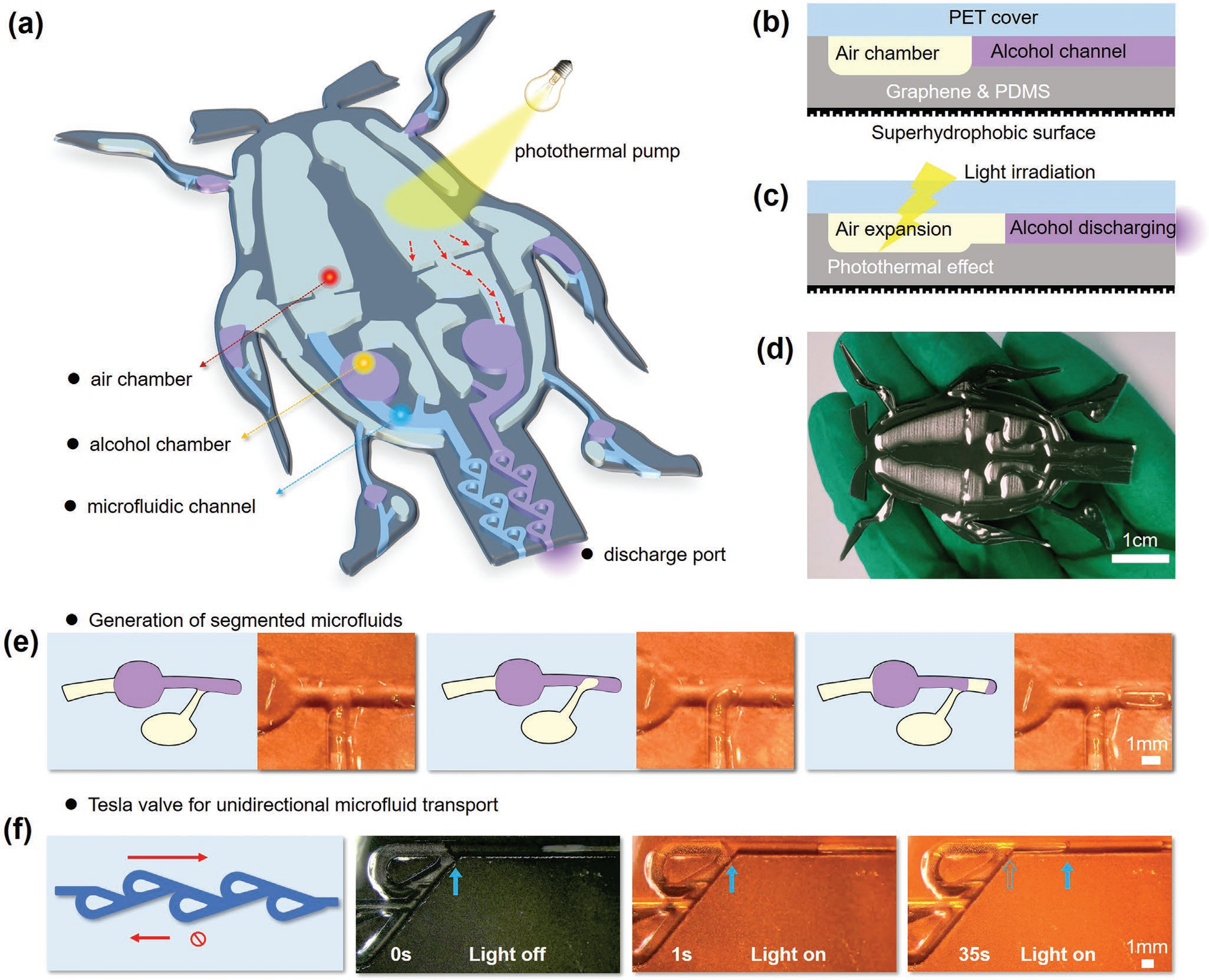
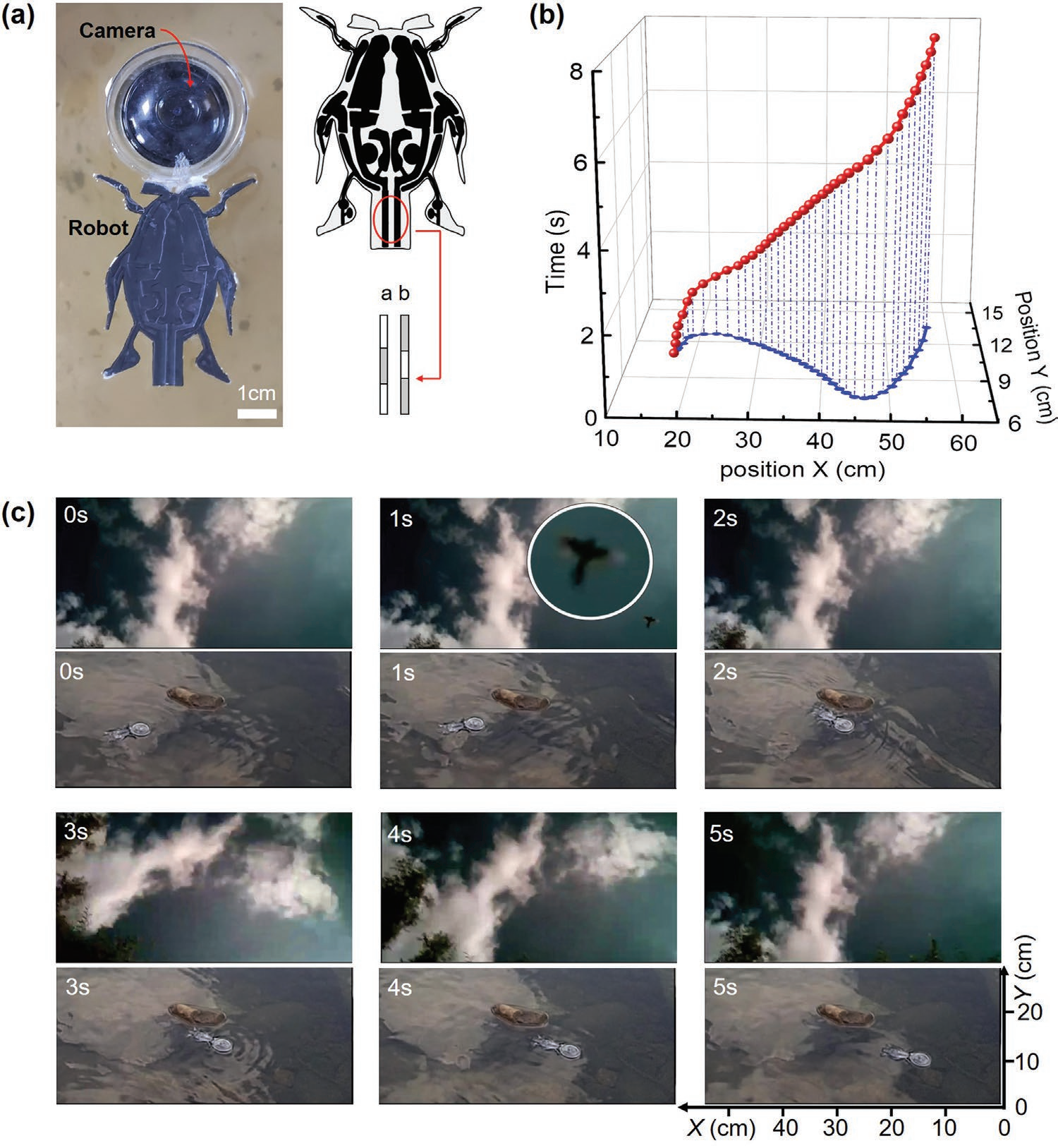
��������ִ�W���������ڈF����ü���ֱ�����g��ܛģ���D�����g��Y�ϵķ����Ƃ���Ƕ������ͨ����T�ͽY����˹���y�����ǻ������ʯīϩ&PDMS�Ĺ��ͺ���՚��ң��Ŀɿ�MarangoniЧ���ӵķ�����Ӿ�C���ˣ��D1�����ڿɿ�ȼ��ጷ��_�P�Ĺ��՚��ҵĎ����£����F����Ӿ�C���˵İ������M����MarangoniЧ���ӵ���Ӿ�C���˞��\��ƽ�_�������Mһ���ڙC�������ϼ������͟o���z��C���������������Ȼ�h���У���ʾ������Ȼ�h���µ��`������͌��h���ıO���^�̣��D2�����C��������Ȼ�h���Дy���z���^�ɹ�Խ�^�ϵK����Ӿ�C�����ϵğo���z���^���Բ��h���D����ҕ�l��Ϣ�l�͵��о��ˆT���֙C���Ƅ��O�����档�Ƅ��O��o���W��ֱ���c�o���z���^朽ӣ���������Ϣ��ݔ�^���еİ�ȫ�ԡ��Ă�ݔ���ĈD����Ϣ�к������^�쵽�h���е��{�졢���ơ��B����Ϣ�����о���ͨ�^���WMarangoniЧ���Ӽ��g�_�l��Ӿ�C�����ṩ��һ�N�µķ�����
ԭ��朽ӣ�https://onlinelibrary.wiley.com/doi/10.1002/adfm.202208677
- �҇��ƌW���OӋ����������Ӿ�C���� 2015-12-11
- �B�T��W�܌W������ Macromolecules���ߏ���𤳬���w�ӑB�߷��ӾW�j�ķ����OӋ����߶���׃��Փģ�M���� 2025-07-03
- ̫ԭ������W�����ֽ��� Adv. Sci.: ������z�x�ܷ�����ģ�ԱO��ָ�����w 2025-07-02
- ���ϴ�W������/����Ⱥ/���� Adv. Mater.����������ʿ�{�{��ܷ��������ݶȿ���Ϳ�� 2025-07-01
- �_�T�t���ӱ����I��W����������PSU�����Fꠡ�Adv. Mater.�������������C/�����T��ʯīϩ�Ě��w-�ض��p�����ɽ������Ԃ��������ǻ��r�I���� 2023-02-01
- �A�ώ�����W��ҫ�����n�}�M ACS Nano��Ƕ���w�S�ر�Ĥ�е�̼�c - ����ֱ��ԭλ����e�Ƃ�ɾ��̡����ܿ��{�ľ����ɹ�D�� 2022-02-10
- ţ���Wʷ��ƽ��ʿ��Bradley Ժʿ���Y���p���Ӽ���ֱ�����g���ȡ��Ĥ���F���ɹܗ�ۺ���朿��gȡ�����еij��߾��Ȳٿ� 2020-12-03
