���գ��|�ϴ�W(xu��)���ܲ����о�Ժ�����W(xu��)�����W(xu��)Ժ��ȫԺʿ�F(tu��n)�(du��)�����z�w�C(j��)���ĽM�b�Ͳٿط���ȡ����Ҫͻ�ơ����P(gu��n)�ɹ��ԡ�Colloidal tubular microrobots for cargo transport and compression�����}���ھ��l(f��)���ڇ�(gu��)�H피�(j��)�ڿ�PNAS������(gu��)��(gu��)�ҿƌW(xu��)ԺԺ�����ϡ��|�ϴ�W(xu��)��ʿ����С����һ���ߣ���ȫԺʿ�͗���������鹲ͬͨӍ���ߡ�
��ȫԺʿ�F(tu��n)�(du��)�����һ�N�鷀(w��n)�B(t��i)���z�w�Y(ji��)��(g��u)�M�b������ͨ�^(gu��)�M�b·���O(sh��)Ӌ(j��)���״Ό�(sh��)�F(xi��n)���ɳ�혴����z�w��M�b�ɏ�(f��)�s�����S���Ĺܠ�Y(ji��)��(g��u)��ԓ�����m�÷����V���܌�(sh��)�F(xi��n)��200�{��30�׳�혴����z���ڰ���ѪҺ�ڃ�(n��i)�ķ�ţ�D���w��(n��i)�Ķ�η���(f��)�M�b��

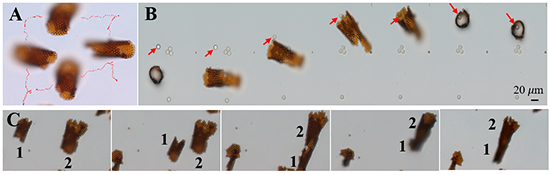
�D1.�z�w��Ĥ�ڴň�(ch��ng)�����¾������ܽY(ji��)��(g��u)�ĽM�b�^(gu��)�̣���(sh��)�(y��n)��A����ģ�M��B����
�D2.�ⲿ�ň�(ch��ng)�����ܙC(j��)���˵��\(y��n)��(d��ng)����A��,؛��ץȡ�\(y��n)ݔ��B�����S��M�b��C����

ԭ��朽ӣ�https://www.pnas.org/doi/10.1073/pnas.2304685120
- ���o(w��)���P(gu��n)��
�\(ch��ng)���P(gu��n)ע�߷��ӿƼ�

- ���ܹ��A��朆���������22��...
- ����(b��o)���C(j��)��(hu��)��500+ˎ��...
- ��(gu��)�HƷ�ơ�ǰ�ؕ�(hu��)�h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ��(gu��)�a(ch��n)������٣����(gu��)���^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��(hu��)
- �Ј�(ch��ng)��300�|��PMEC China ɫ...
- ����ע��(c��)��2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �������/˾һ�����۳Ǵ�...
- ����W(xu��)�����h(yu��n)���ڈF(tu��n)�(du��) AFM...
- ��ɽ��W(xu��)����n�}�M CEJ����...
- ���ݴ�W(xu��)�����ƽ��ڈF(tu��n)�(du��)��Ac...
- ���W(xu��)������(gu��)����T PRL����...
- �㽭��W(xu��)�Ǿ�܊���������F(tu��n)�(du��)...
- �����ִ�Źٱ����ڡ�������...
- �п�Ժ�{����Դ�����ܡ�����...
- �V�t(y��)��Ժ���١��V���T��ܰ N...
- �������i�w/���������...
- ����炐�ȁ���W(xu��)���h����...