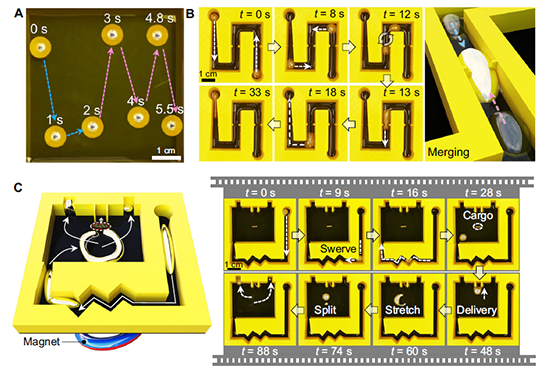
��Ȅ��ԙC���ˣ�ܛ�w�C�����܉F�������ɶȵ�׃�Σ�������ײ�r���õ������������Ķ���Ч���a�C���c��֮�g�Cе���|�IJ����ߑ����еİ�ȫ�ԡ����Mһ���x��ܛ�w�C�����Դ��Բ��sС��С�߶ȣ����׳߶ȼ����£��t�����ڴň��ٿ����F���w�h����ܛ�w�C���˵��h�̾��_���ơ��������ܛ�w�C���������M�����w�г�Ҏ�t���ֶ��y���|���ĪMխ�^���Ј����΄գ��Ķ��������t�W�I��չ�F����đ��Ãrֵ [Chem. Rev. 2022, 122, 5317; Nat. Rev. Mater. 2018, 3, 74]��
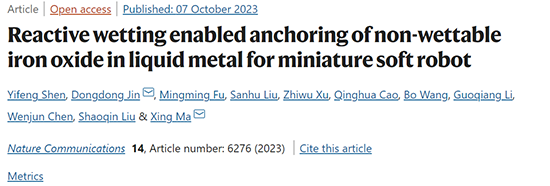
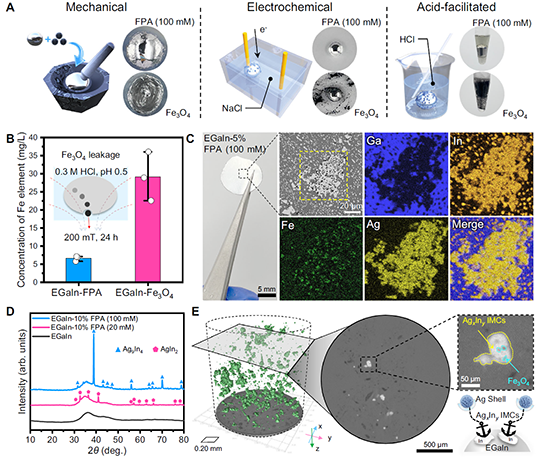
Һ�B���ٴ���ܛ�w�C�������䪚�صIJ������ԡ���׃���Ժͽ��ٌ��Զ��ܵ��V���Pע�����˘���ԓ���͵Ĵ���ܛ�w�C���ˣ��о��ˆTʹ���˲�ͬ���Խ��ٷ�ĩ��Fe��Ni��NdFeB��Gd�ȣ��cҺ�B���٣�扺����㟺Ͻ�ȣ��M���ͺ���Ȼ�����@Щ�^��������ه�����ٷ�ĩ�cҺ�B�����g�ĺϽ�������Һ�B��������Ĥ𤸽���ã��Ƃ�õ��Ĵ���Һ�B���ُͺϲ��ϴ��ڴ����S�r�g˥�˺����ٷ�ĩй©�ȝ����L�U�������ʹ�ô��ԏ������������������Ժõ����������F��Fe3O4�����Բ��ϣ��t���������cҺ�B�����g��ı�����ʧ�����}��չ�F���߶����������ԣ��Ķ��o�����FҺ�B�����c���Բ��ϵĸ�Ч�ͺϡ�


ԭ��朽ӣ�https://www.nature.com/articles/s41467-023-41920-4
- �|�ϴ�W����������n�}�M Adv. Mater.�����ڟo�C��W�j���潻�Q��Һ�B������ī 2025-06-20
- �|�A��W����־���ڡ�����x���� Mater. Today��������늹�Һ�p��Һ�B���ٌ��w - �������ӿ������������ 2025-06-11
- �A�ώ����� Small���w�S�ؼ{������Һ�B����Pickering��Һ������ᡢ���ֱ��īˮ 2025-04-25
- �K�����������WԺt�ղ�ʿ�ȡ�Nat. Commun.��������ܛ�w�C����朿����ۯB�ɏ��s���B�Y�� 2023-03-12
- ��ӿƼ���W������������W�Fꠡ�Adv. Mater.����3D��ӡ����ܛ�w�C���ˌ��FҺ�ε��`��ٿv���w���\�� 2022-02-18
- ���������ƾ��_�c�A�пƴ����t����: 3D��ӡˮ���z�����Ĵ���ܛ�w�C���� 2021-10-29
