�������������������t�W���L;�\ݔ��ˮ��̽�y�����b��֪���g�е���Ч���ö������Pע���c���y�Ą���������ͬ��ܛ��������ܛ�Ժ�׃������ʹ���܉��׃�Π���挦���s�����h����Ȼ�������y��ܛ�����ڳ�ȥ����ṩ����Դ֮��o���S������׃�Σ��Ķ��֏ͳ�ʼ�ΠȻ�����ڌ��H�����У����m���܁��S������׃�Ό�������������đ��íh������ˣ��挦���s�đ��íh�����_�l�㹩�ܱ�ɾS������׃�β����ض����c�Π�ɻ֏͵�������ܛ�w�C���˵Ŀɳ��m�lչ������Ҫ���x��
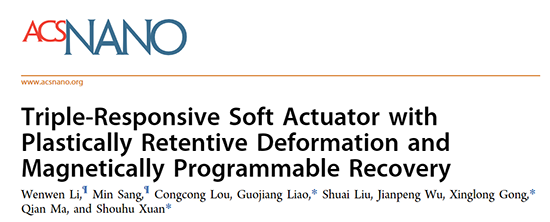
�b�ڴˣ��Ї��ƌW���g��W���d�����ڈF������һ�N���пɱ�������׃�κͿɾ��̴Ŵ̼��Π�֏͵���푑�ܛ��������ͨ�^�ԽM�b�ܶȳ��e�����Ƃ������w�S�ؼ{���w�S/����ϩ��/Һ�B����(CNF/PVA/LM)��Ĥ�������c���Ծ۶���������(MPDMS)��Ĥ�M�ɵ�늟�-���t���-�ň���푑�������ԓ�����������/��̼��®a������׃�Σ���׃���ڟ�h���п�ͨ�^�ň��̼��Π�֏͡�ԓܛ�����������^�͵�늉�(1.2 V)���F�^����(114��)�����ҿ����ڵ͏��ȵĽ��t���(0.64W cm-2)���F�h���x�ӡ�ͨ�^��׃���δň��ķ�����ʾ�˝L�әC���˵ı��������Ͱ��\�C���˵ď��s�B�m�\�ӡ��@�N����̼�푑�������늉��Ϳɾ����Π�֏���һ�w�����������_�l���ڏ��s����ϵ�y�����ܲ����ṩ���b�����P�о��ԡ�Triple-responsive Soft Actuator with Plastically Retentive Deformation and Magnetically Programmable Recovery�����}�l��������һ�ڡ�ACS Nano���ϣ�Փ�ĵ�һ���ߞ��Ї��ƌW���g��W���̿ƌW�WԺ��ʿ���������Ͳ�ʿ��ɣ����ͨӍ���ߞ��·����о��T�����d�����������ػ������� ���ߌ��w�S�ؼ{���w�S�أ�CNF��������ϩ����PVA����Һ�B���٣�LM����ϣ������ԽM�b�ܶȳ��e�����Ƃ��˾���늟�/������ܵ�CNF/PVA/LM��Ĥ��Ȼ�����c���Ծ۶���������ͺ��Ƃ���CNF/PVA/LM/MPDMS (CPLMMP)���������D1a������CNF/PVA/LM�ӵğ��տs��MPDMS�ğ���Û�����Ч��ʹ������늟���̼��®a������׃�Σ����ڟ�h����푑��ň����F���ɾ��̵��Π�֏͡����D1b��

�D1 CPLMMP�������Ƃ�ʾ��D
����LM�����Č���Ժ�CNF/PVA/LMĤ�cMPDMSĤ�ğ���Ûϵ���IJ��CPLMMP�������F�������õ�늟������ܡ���������ͨ�Դ֮��CNF/PVA/LM���տs��MPDMS����Û��������MPDMS����CNF/PVA/LM�ӏ�����������0.4 V����늉�����Ԯa�����О顣����늉����ӵ�1.2 V�r�������ض��_��82.5 �棬�������_��114��, չ�F�����õ�늟����О顣���D2��

�D2 CPLMMP������늟������ܡ�
���⣬CPLMMP����߀�����ɼt����ӣ��ڽ��t��������£�CNF/PVA/LM���տs��MPDMS����Û������������MPDMS����CNF/PVA/LM�ӏ�����ȥ�����t����CPLMMP�������a��������׃�Οo���֏ͣ����������Π��ǹ̶��ġ�Ȼ���@�N׃�ο����ڟ�h����ͨ�^���Ӂ��֏͡�����Ԫ��ģ�M�Y��Ҳ�ɹ��A�y����׃���О飨�D3�������Π�ͻ��Π��׃�κͻ֏ͽY������ԓ�����ڷ����C�����о��ЏV韵đ��Ý�����

�D3 CPLMMP�����Ĺ�������ܺ��әC����
����CPLMMP�����Ĵ������ܣ��l���������ԽM�b�ɞ�L݆�C���ˣ�չʾ�����ڏ��s�h�������õı������������D4�������S�F����F���ԣ����Ƴ�ʩ�ӵ���ň���MPDMS��Ĥ���и�ʣ�š����ڝL݆�C���˵ײ������c��Ż������෴��С�ň��r���L݆�C���˕��������������S��ŘO��׃���\�ӡ��L݆�C�����ԡ�0.66 cm/s���ٶȴ��^���Ă��ϵK�ĵ�·(�D4d)������ǰ�M�^����ֱ�к��D�����`���{����չʾ�����ڏ��s�h���еďV韑���ǰ����
�D4 ���� CPLMMP�����ĝL݆�C���ˡ�
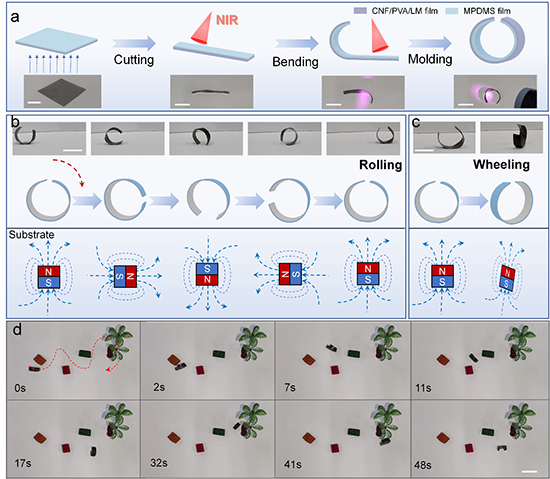
����CPLMMP�������õĿɾ������ܣ������и���ͺ�Ĥ������Ҏ�t���������\�d�C���ˡ�����NdFeB�w���Ŀɾ��̴Ż����ԣ�ʹ���ķN��ͬ�ĴŻ��������Ƃ���в�ͬ�Ż�����M�ϵ��\�d�C����(�D5)�����˸��õ��˽��\�d�C���˵��\�әC�����x���˵����N�Ż���ʽ���\�d�C����(��)(�D5c)�����о�����չʾ���\�d�C������֫���շ��^�̡��ڽ��t����£��\�d�C���˵���֫����տs����ȥ��֮���\�d�C�����Π�̶����ʽ�������S���\�d�C���˷�����߅�L��1cm �������δ��F�ϣ���߅���ň��������£�ԭ���տs����֫��ጷţ��֏�ԭ���Π�����\�d�C���˵��A�Ż���ͨ�^��׃�C�����·��ň��ķ�����������C���˵��\�ӡ����ڙC�������õ��Π���������Լ��ڟ�h����ͨ�^��푑��Π�֏��������\�d�C���˿��Ԕy�����w�ڲ�ͬ���Ηl����ĥɰ�ܵ������������б�£����\�ӣ����\�����g���ܺõİ���ס��Ʒ��ֱ�����_�K�c��ͨ�^��/���ጷ����w�����D6���@�N���õĿɿ��ԘO����չ��ܛ�����đ����I��
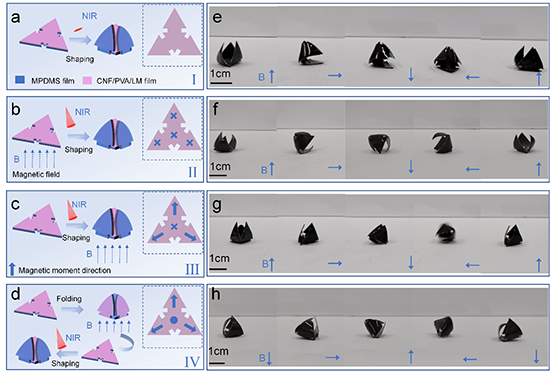
�D5 ���� CPLMMP�������\�d�C���˵Ŀɾ������ܡ�
�D6 ���� CPLMMP�����ĝL݆�C���ˡ�
ԭ��朽ӣ�Wenwen Li, Min Sang, Congcong Lou, Guojiang Liao, Shuai Liu, Jianpeng Wu, Xinglong Gong, Qian Ma, and Shouhu Xuan, Triple-Responsive Soft Actuator with Plastically Retentive Deformation and Magnetically Programmable Recovery, ACS Nano, 2023, DOI: 10.1021/acsnano.3c08888
https://doi.org/10.1021/acsnano.3c08888
- �����������������n�}�M JMPS/Acta Biomater.�����������c�����Ԙ˶���푑���׃���c��׃�� 2024-04-24
- �㽭��W�x���Fꠡ�Matter����ģ�K��4D��ӡ 2020-03-12
- ���m̹���״�W����ˬ��ʿ Adv. Mater.: ̽�����w�О� - �����ܲ��ϵ������OӋ 2025-05-04
- �Ͼ���W����/����/�Y��/Ѧ��Nat. Commun.�������ڸɼ����o���������ľ߿ɾ��̕r�����W��̖ˮ���z 2025-04-20
- �пƴ��u�V/���t���K�������� Nat. Commun.: �Y�Ͽɾ��̽Y��ɫ�c���ГQ�Aƫ��l��ĄӑB��ģ�B��Ϣ���� 2025-03-12
- �A�ώ���������W�ȿ� Carbohyd. Polym.�������܄����Ԅ��x�����ܺ��Ƃ��w�S�ؼ{���w�S 2025-04-24
- ��h������ȫ�X/ʯ��Ⱥ��ꃿƴ�O���� CRPS�������Ȼ�λ�c�Ķ༉�������w�S�ؼ{���w�S��ך����zĤĦ��늲��� 2024-05-03
