��ɽ��W���M/�������I��W�ՄP AM�����ڸ�����ˮ���z���еĶ�ģ�B�߾����˙C����ϵ�y�����������ӿ���
�X���������{�������ȫ�����XѪ�ܼ���֮һ��������Ҵ����������fͨ·�ܓp�������²�ͬ�̶ȵ�֫�w����ϵK������Ӱ�������������\���ǣ��L�ں��؏͵��\�ӱ��J����һ�N��Ч�IJ��ԣ�����ͨ�^��u�ӏ�ƫ�c�^��ļ����Ӂ����Ʋ��飬�Ķ�ʹ������K���͡������y�ı��ӿ��ͷ�����ҪӖ�����ص��t���ˆT���M�ð��F�ҹ��������e����COVID-19���������g����ˣ��˂�����˸��N��������͙C���ˁ��o�������M���؏����\�ӣ��c�ք�ģʽ��ȣ����Ը��õر��C���L�ڿ���Ӗ���Ќ�ÿ���؏����\�ӵ��l�ʺ͏����M�о��_���ƣ��Ķ����tԺ�õ��V�����á�Ȼ�������ӿ��͵�Ч���^����o���γɏ���D�����еķ��]��·������������ӿ��Ͳ��Ա�����������͙C�����c���M���˙C����(HMI)���g��Y�ϣ�ͨ�^�A�ȫ@ȡ���ߵ��\����D��ʹ�������Ӆ��c����Ӗ�����������ӿ��ͣ�����A��ͨ�^���_���`��Ă��������r�ɼ����w�����\����̖��
�о��ˆT�ѽ��C����ͨ�^����Ƥ늘O�������ض����w��λ�ı�Ƥ����늈D(EMG)���X늈D(EEG)���������̖�������R�e���w�\����D���cEEG��ȣ�EMG��̖�����ײɼ���̎�������m���������ӿ��͡�������EMG��̖�����w�\����D�R�e߀���ڃɂ���Ҫ����һ�������\�ӂ�Ӱ�Ĵ��ڣ�������ȵı���EMG��̖�IJɼ������y�����ڲɼ�EMG��̖�ı�Ƥ늘O��Ҫ�ߌ���ԣ����cƤ�w�o�ܱ��ν��|���Ԍ��F��늘O-Ƥ�w�����迹���@�ǫ@ȡ���|��EMG��̖���P�I�����ǏĆ�ͨ��EMG��̖����ȡ������׃����������Ч�^�ֶ��������������R�e�ʴ_���^�͡��������EMG���w�������̖����ʽ�������ʶ���ͨ����EMG�˙C����ϵ�y�IJ�ͬͨ��֮�g����̖�����^�����࣬�ʶ����ͨ���������ڜʴ_�ʵ��������ޡ�����EMG��̖�⣬�����D(FMG)����һ�N��Ҫ�ļ�������̖���DZ�EMG��̖��ƽ������̖�����Ɂ���ͬһ����^���EMG��̖��FMG��̖���˙C�����п�������˙C������Ч�ʺ͜ʴ_�ԡ�
�������S�W�j�Y���ĸ�ˮ���z�������Ƥ�w�ęCе���ܡ�����ԡ����������ԡ��ͳɱ��Ͷ�̼�푑��ԣ�ʹ��ɞ��˙C��������ϣ�������Ԃ��в��ϡ����Ƃ��Ƥ늘O�r��������Ҫ��ˮ���z��ճ�������M�Ѓ����������ڰl����������r�£�Ҳ����ˮ���z�c����Ƥ�w֮�g����һ���o�p���m�Ρ��L�ڷ����Ľ��档һ����f������ͨ�^�ھW�j������ճ�ϳɷֺ��܈F������ˮ���z����ճ�ԡ���ˮ������Ć��l����ˮ���z�����븻������ӻ��F�����|������ˮ�h���Ќ��Fճ������Ч���ԣ�����ˮ���z�����L�r�gճ����Ƥ�w���档���⣬��һ���ˮ���z�O�yС��FMG��̖�ǘO�������Եġ��@�������ڛ]�������C�ƅ��c����r�£����wˮ���z��С׃�����x�ӂ�ݔ;����׃�����Ժ��Բ�Ӌ���Ķ���������푑��Բ���������Ҫ�Mһ���_�l�������ܵ�ˮ���z������������ͬ�r�������˙C�������̖̎���͂�ݔģ�K��߀��Ҫ�OӋһ�NС�ߴ硢���ĵ�����ӡˢ�·��(FPCB)���������������ڃȵĸ��N���Ԫ�����������Ի����ϣ��Ա��C�����˙C����ϵ�y�Ŀɴ����ԡ�
���˽�Q�@Щ������ɽ��W���M�F��������I��W�ՄP�F���ǰ��ˮ���z�������܂�������ϵ���о������Ļ��A�ϣ�Nature Communication 2023, 14, 5221; Advanced Functional Materials 2023, 33��2300046�� Advanced Functional Materials 2023, 2308280��ACS Nano 2023, 17��16160��Nano-Micro Letters 2022, 14, 52��Nano-Micro Letters 2022, 14��183��Advanced Science 2022, 9��2104168��Nano-Micro Letters 2023, 15, 136��Advanced Science 2023, 10, 2205632��SmartMat 2023��4��e1141��SmartMat 2023, 4, e1147���������_�l��һ�N���ܿ���HMIϵ�y��ԓϵ�y�Y���˶�ģ�B����ģ�K���˹�����(AI)�㷨�����F�˸߾��ȵĄ�����D��a�����әC���˵IJ�����ԓ��ģ�B����ģ�K�ɸߌ���ԡ��������ԡ���ճ�Ժ����������ԵĆΌ���(TA)���Ծ۱�ϩ����(PAM)ˮ���z����Ƥ늘O�ͻ��ڴ��ˮ���z�Y��(Foam-PAM)�ĸ��`���ȉ����������M�ɡ�ͬ�r���OӋ���`�С�ߴ硢�p������FPCB�����ں��m����̖�{����̎���͟o����ݔ���c������ģ�K�γ�����Ŀɴ���HMI�ӿڣ�����������ݔ��������������������̖�M�зָ������ȡ��AI�㷨����R�e����ȡ�\����D���γ������Ŀ�������c���y�Ķ�ͨ��EMG��̖��ȣ�����EMG��̖��FMG��̖�ϵĶ�ģ�B�˙C��������ͨ�^���ӽ�����̖����Ϣ�أ��@��������˙C����Ч�ʡ����ڲ�ͬ�քݣ���ͨ��������̖�Ľ�a�ʴ_���_��91.28%���h����Double-EMGģ�͵Ľ�a�ʴ_��(48.89%)���Mһ�������_�l�������˙C����ϵ�y���ƙC�������ף����F��������\����D���c�����ӿ���Ӗ������C��ϵ�y�Ŀ����ԡ����⣬߀��ʾ��ԓϵ�y���Cе�֡�������܇���o�˙C�������b��ƽ�_���քݿ��ơ���������һ����ģ�B��Ȼ�˙C����ϵ�y���OӋ�����һ�N�µġ����εIJ��ԣ����F��һ�N�������ܡ���Ч����ݵĽ�����ʽ�����P�����ԡ�High-Performance Hydrogel Sensors Enabled Multimodal and Accurate Human�CMachine Interaction System for Active Rehabilitation�����}�l����Advanced Materials�ϡ�ͨӍ���ߞ���ɽ��W���M�����ں��������I��W�ՄP�����ڡ���һ���ߞ���ɽ��W����c��Ϣ���̌WԺ��ʿ����������������
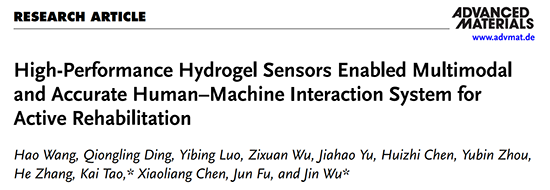
�D1. �ɴ����˙C���������OӋ��(a)����ˮ���z��EMG�͉���������֧�ֵĿɴ���HMI�����������AI�o���������ӿ��͙C����ϵ�yʾ��D�����˙C�����о��ЏV���đ���ǰ����(b)�����OӋ��FPCB���ӽY��ʾ��D��(c)�@ʾFPCB�c���wƤ�w�����ͱ��ν��|����Ƭ(i)HMI������D(ii)�͂�������HMI�ϵķֲ�(iii)��(d) NaCl-TA-PAMˮ���z��(e) Foam-PAMˮ���z���Ƃ����ʾ��D��

�D2. ˮ���z���в��ϵı�����(a)�ψD:���x��ԇ�ʾ��D;�D��PAM��TA-PAM��NaCl-TA-PAMˮ���z�ڲ�ͬ���|��ճ���r�Ą��x���cλ��������(b)�ψD:��Ƭ�@ʾNaCl-TA-PAMˮ���z(�ütɫ�AȦ�˳�)�ι̵�ճ���ڸ��N������:���١����ϺͲ������D��NaCl-TA-PAMˮ���z�ڲ�ͬ���|�ϵ�ճ�����ȡ�(c) NaCl-TA-PAMˮ���z��ˮ��ճ����(d) NaCl-TA-PAMˮ���zճ������Ƥ�w�͝��iƤ�ϵ���Ƭ���Լ�NaCl-TA-PAMˮ���z�c�iƤ�o�p���ν��|���@�R��Ƭ��(e) TA-PAMˮ���z��NaCl-TA-PAMˮ���z������늘O���迹���^��(f) Form-PAMˮ���z����Ƭ��W�@�R�D��(g)ԭʼPAM(��)��Form-PAM(��)ˮ���z��SEM�D��
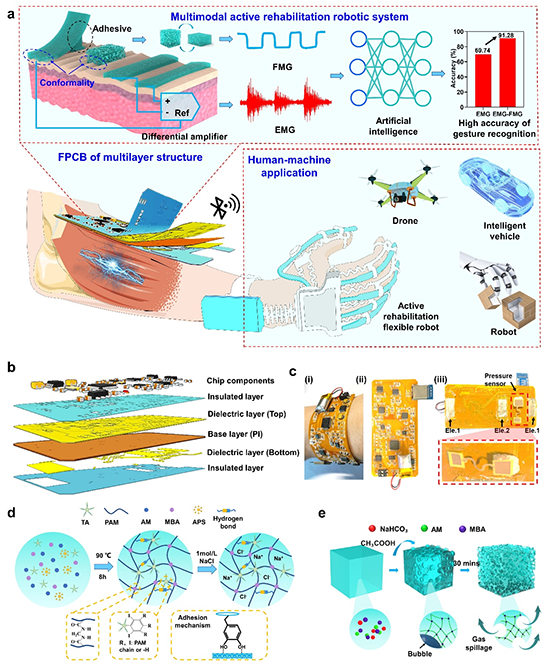
�D3. NaCl-TA-PAMˮ���z��Foam-PAM�Ă������ܱ�����(a) ECG��EMG��EOG�z�y��늘O����λ�á�NaCl-TA-PAMˮ���z�ɼ���(b)EMG��̖��(c)EOG��̖���Ρ�(d)����늘O��NaCl-TA-PAMˮ���z�ɼ��������̖���Ρ�(e)����늘O�cNaCl-TA-PAMˮ���z�@�õ������̖�ķ��ֵ������ȱ��^��(f)���r�����S��������׃����׃����(g)������������푑���(h) Foam-PAMˮ���z�����������Ă��ЙC��ʾ��D������ʩ�Ӊ��������ڿ�϶��u�]�ό��µČ��·���s�̺͌��ͨ�����ӡ�(i)�Ӊ�ǰ(��)�ͼӉ���(��) Foam-PAMˮ���z�Ĺ�W�@�D��(j)������푑��ͻ֏͕r�g�졣(k)�������ڲ�ͬ�l��(0.2��0.4��0.8��1.6 Hz)��285 Pa���������푑���(l) 300 Pa������300��ѭ�h�ĄӑB���׃����(m)�����M�Ļ���ˮ���z�ĉ������������`���ȡ�푑�/�֏͕r�g��LOD������������_�D��
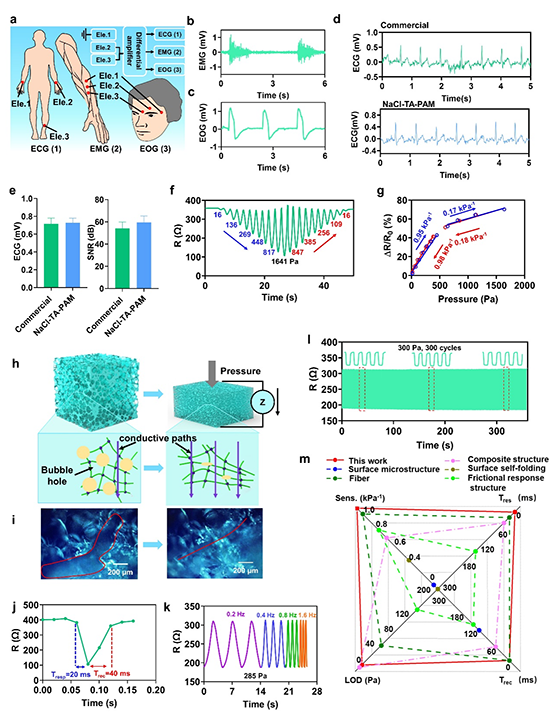
�D4. �˹������o�����О���D�R�e��(a)��ͬ������D(�ք�ȭ��ok��һ����������ϵ���)�µ�EMG��FMG��̖��(b)������D��a�����㷨���̈D��ʹ�ø��N�㷨�����˙C�����ݔ�Ĕ����M�зָ������ȡ������R�e��(c)EMGģ���cEMG-FMGģ��PCA�D���^��(d)EMGģ���cDouble-EMGģ��PCA�D���^��(e) )EMGģ���cEMG-FMGģ�̈́�����D��a�A�y���ʷֲ��ı��^��(f) EMGģ���cDouble-EMGģ�ͽ�a�Ą�����D�A�y���ʷֲ��ı��^��(g) EMGģ�͡�EMG-FMGģ�͡�Double-EMGģ�̈́�����D��a�ʴ_�ʵı��^��

�D5. ���ӿ��͵ȑ����˙C����ϵ�y���O�cʾ����(a)�������ӿ��ͻ�����HMI���õ��]�h�ɴ���HMIϵ�y�������̈D��(b)��Ƭ�@ʾ����ʹ�õĿ����������o�������������D�������M�������Ą���������ԓϵ�y�����ӿ����еĿ����ԡ�(c) EMG-PP�c�������Pϵ��(d)ʾ���h�̱O�y�\����̖��HMI�ӿڲɼ�����̖����ֱ���ς����ƶˣ��t���h���\�࣬���黼����һ���Ŀ����ί��ṩ���h��
Փ����Ϣ��H. Wang, Q. Ding, Y. Luo, Z. Wu, J. Yu, H. Chen, Y. Zhou, H. Zhang, K. Tao*, X. Chen, J. Fu, J. Wu*, High-Performance Hydrogel Sensors Enabled Multimodal and Accurate Human-Machine Interaction System for Active Rehabilitation. Adv. Mater. 2023,2309868.
ԭ��朽ӣ�https://doi.org/10.1002/adma.202309868
���d��High-Performance Hydrogel Sensors Enabled Multimodal and Accurate Human-Machine Interaction System for Active Rehabilitation
