ܛ����׃�����w��һ�N�ڏ��Ի��w��Ƕ��ܛ�������ӵ����ܲ��ϡ��ڴň������£�ܛ����׃�����w�������@�Ĵ���׃���О飬��ܛ�w�C���ˡ��|�X�@ʾ���I����ЏV韵đ���ǰ�����F�д�����P��ܛ����׃�����w����Փ��������������������o�B��������О��ϣ��������ˑT�Ԍ�����������О��Ӱ푡�Ȼ�����T�Ԍ���ܛ����׃�����w�ڴ����I��đ����������P��Ҫ�����á����磬��ܛ����׃�����wĤ���ⲿ�ň������ӕr�������ܰl�������⣬��������˹�f���c��ͨ�ܶȵ�ƽ�������ȣ�ܛ����׃�����w���ܰl�����C��ӡ�����֮�⣬���ڴň��ĚW�����ԣ�ʩ����ܛ����׃�����w�����ϵ�����˹�f�����Hȡ�Q����ʩ�ӵĴ�ͨ�ܶȣ�Ҳ�������ĽY��׃�����P����ˣ�����ܛ����׃�����w�Ĵ���ϵ�y���H����һ����׃ϵ�y��
�鏛�aܛ����׃�����w���О��БT�����õ�ȱʧ���Ї��ƌW���g��W���d���F������һ�N���͵ģ���������ͬ��ܛ����׃�����w�ĴŻ����Ǿ���ճ���͑T��Ч����������τ����Wģ�ͣ���̽���ň����T�Ժ�ճ���О錦����ӄ����W�О��Ӱ푣����_�l�˺�ģ�͌���������Ԫ�Ñ��ӆ�Ԫ��������ָ������ͬ��ܛ����׃�����w�������OӋ�͑��á����P�о��ɹ��ԡ�Modelling the dynamic magnetic actuation of isotropic soft magnetorheological elastomers���l���ڇ��H���WTop�ڿ�International Journal of Mechanical Sciences�ϡ�Փ�ĵĵ�һ���ߞ��Ї��ƌW���g��W���̿ƌW�WԺ��ʿ����������ͨӍ���ߞ����d�����ڡ�
�������߲����B�m���|���W�����������˰�������ͬ��ܛ����׃�����w�������Ż��ͷǾ���ճ���О�������ܺ�����֮��ͨ�^����˄���˹-���ʿ˲���ʽ���õ��˱���ģ�͌����đ����ʹň����ȱ��_�������M��֮����ͬ��ܛ����׃�����w���o�B������׃���D1a�����Ż����D1b�����ڲ�ͬ��׃��ֵ/���d�l���µ�ճ���ԑ�����׃�����������D1c���Č���ģ�ͽY���Č��ȱ�������������ģ���܉�ʴ_�ؿ̮�����ͬ��ܛ����׃�����w�ĴŻ��ͷǾ���ճ�����W�О顣

�D1 ����ͬ��ܛ����׃�����w�Ĝ��o�B������׃��a�����Ż���b���ͷǾ���ճ��������׃����������c����Exp����ģ�M��Sim���Y������
�S�����ߌ�����ģ���M��������Ԫ�xɢ�����Ķ������ˑT��헵�ؕ�I�������^���������ƽ�摪׃�Ĺ��c�ȅ���Ԫ�ں��μ��Џ�����ӣ��D2a�����o�B���ӣ��D2b���̈́ӑB���ӣ��D2c���µ���Փ�������Ԫģ�M�⣬��C��������τ����Wģ��������Ԫ��������_���a����Ȥ���ǣ��������Ҵň������������˹�f���c��ͨ�ܶȵ�ƽ�������ȣ��������ƽ�摪׃�Ĺ��c�ȅ���Ԫ�ĄӑB�����О���F�����@�ij��C������ԡ����w�w�F��ϵ�y������l���Ǵň������l�ʵăɱ���Ҋ�D2c��

�D2 ����ͬ��ܛ����׃�����w�������ƽ�摪׃�ȅ���Ԫ�ں��μ��Џ�����ӣ�a�������o�B���ӣ�b���̈́ӑB���ӣ�c���µ���Փ����Analytical��/��ֵ�⣨Numerical��������Ԫģ�M����FEM���Č���
֮����������C��������φ�Ԫ�����ߌ��ɸ���ͬ��ܛ����׃�����w�ͷǴ��ԏ����w�M�ɵ��p�����Ĵ��ӄ����W�О��M��������Ԫģ�M��ͨ�^����Ԫ����ģ�M��ּ���˽�T�Ժ�ճ�����О錦����ͬ��ܛ����׃�����w����׃�ε�Ӱ푣���ʾ����ͬ��ܛ����׃�����w�ӽY���ķǾ��Դ����О���OӋ�����Ĵň����Ʋ��ԣ����_������ͬ��ܛ����׃�����w�����Ĵ����О鰴���A���M�С�
��һ������Ԫ������������������߅��l����ʾ��DҊ�D3a����ԓ���������У�����ģ�M�˾��в�ͬ�A�ǵđұ����քe�ڲ��ó����ԡ�������ճ����������ճ�����T�Բ���ģ���µĴ���ƫ�D�О顣���o�Ɇ�����ʩ�Ӵň������ڸ���ͬ��ܛ����׃�����w�Ͳ����ŏ����w��֮�g�đ���ʧ�䣬�p�������l������׃�Ρ��D3b�ĽY����������ͬ�A�ǵ��p������ͬһ�ň��µ�ƫ�D�����Dz�ͬ�ġ�����������C��Ҋ�D3a�������в�ͬ�A�ǵ��p����픲����c��x�S��λ��Ҋ�Dc���������ɷN����ģ����ȣ�ʩ�ӽo����ͨ�ܶȕr��ֻ���������О�IJ���ģ�͌����Ĵ���׃�������ԭ�����ڑT�Ժ�ճ�����О���һ���̶�����K�˲��ϵĴ���׃���О飬��ͬ�r���T�Ժ�ճ����Ҳ�Ӿ�������Ԫ����ģ�M�еĔ�ֵ���Ք��О顣����֮�⣬�D3c�е��ӈD�ĽY�����������ھ�����ȃAб�ǺͲ��ÄӑBճ������ģ�͵��p�������ڴň���������F�p����ʎ�F��
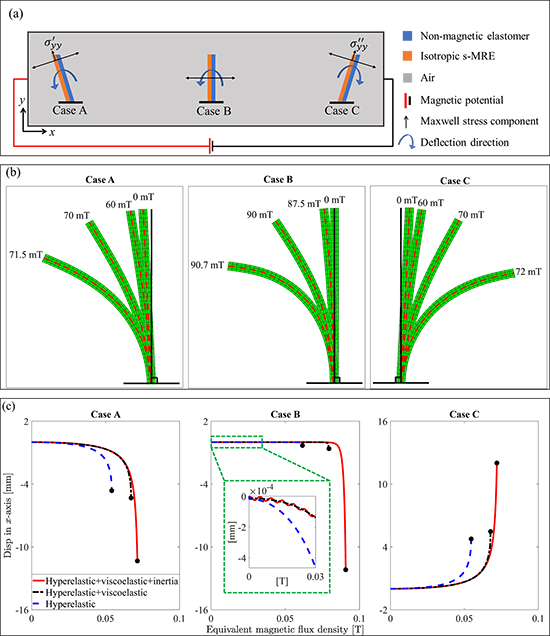
�D3 ���в�ͬ�A�ǵĸ���ͬ��ܛ����׃�����w�p�ӑұ�����a���ڴň������®a��������˹�f���������Ĵ���ƫ�D��b���Լ����ò�ͬ����ģ��������λ�Ƶı��^��c��������Ԫ��ֵ���Ք����_ʼͨ�^�D�еĈA�c��̖��ʾ
�ڶ�������Ԫ���������漰����ͬ��ܛ����׃�����w�Ͳ����ŏ����w�p�ӹ�֧���ڄӑB�ň������µĴ�����푑�����֧���Ĵň�߅��l���ʹ���׃�ηքeҊ�D4a��b���M�ܺ����Ĺ�֧���Y���͌��H�Ĵ��ӽY�����ڲ����ͨ�^�@�N���Ӷ��S�p�ӹ�֧��������Ԫ���������ɽ�ʾ���ӽY�����ڏ��s�ķǾ��Ԅ����W�О������Ȍ���֧��ʩ�ӷ�ֵ��0.05 T�����ҽ�׃�ň����p�����ϲ����c��y�S�ķ�ֵλ�ơ���ֵλ�ƺͷ��ֵλ�ƺʹň������l�ʵ��Pϵ��D5a��ʾ�������������l���µ�׃�Εr�g�v�̡�FFT׃�Q�Y�������D�������R�D��D5b��5g��ʾ�����ڴ��¼������c��ͨ�ܶȵ�ƽ�������ȣ���������w�F�����C����О顣ԓ����ģ�M�Y�����������ڸ���ͬ��ܛ����׃�����w����ϵ�y�ĸ��l��ӿ���ͨ�^ʩ���������l�Ĵň�������̖�a����������̖��˥�p�S�l�ʵ����Ӷ������@�N�C�ƿ��������������Ϣ�Ă�ݔЧ�ʡ����⣬���ڸ���ͬ��ܛ����׃�����w��ϵ�y�������\�әC�����I��đ��ö��ԣ����������@�N����C�ƷŴ�������λ�ƣ��Ķ����͌���������Ӵň����ʡ�ֵ��ע����ǣ�����ʹϵ�y�_���@�ӵ��C��Ŵ���ʎ���ň������l�ʑ�ԓ��ϵ�y�C���l�ʵ�һ�롣

�D4����ͬ��ܛ����׃�����w�p�ӹ�֧����a���ڴň������µĴ���׃���О飨b���������Ĵ�ͨ�ܶȞ�0.1 T

�D5����ͬ��ܛ����׃�����w�p�ӹ�֧����y�Sλ�ƺʹň������l�ʵ��Pϵ��a������a�����������ʹ����l��������λ�ƕr�̽Y����FFT׃�Q�Y�������D�������R�D�քe���ڣ�b������c������d������e������f������g���У��D��b������c������d���е����η�̖�����ň�������l��
�S�������M���˹�֧���ڲ�ͬ��ͨ�ܶ����ҽ�׃�ň��´����О��ģ�M���Y��Ҋ�D6a���@Ȼ����֧���������p���B�����О顣��0.07 T��ͨ�ܶȞ��������ň������l�ʳ��^�ڶ��A�����l�ʣ�9.15 Hz���r��λ�Ƽ����pС�����Д�ڶ��A�����l���Ƿ��Ǿ��Ԅ���ϵ�y�еĹ������S�О飬���ߌ���֧��ʩ���ˏ�7.5 Hz��11.5 Hz������ͷ�����l�ň����������λ�ƕr�̽Y��Ҋ�D6b���@Ȼ��������ͷ�����l�ň��������p�����ķ�ֵλ������ȫ��ͬ�ġ��@�N�������S�О�ɚw������ʩ�Ӵň��ĚW�����|���Լ��T�Ժ�����˹�f��֮�g�ď��s������á���һ���棬��D6a��ʾ����֧���Ĺ����l���S����ʩ�Ӵ�ͨ�ܶȵ�������pС���@���������C�ƞ飺�������Ҵň�������ԣ��^��Ĵ�ͨ�ܶȌ����^����o�B����˹�f�����^����o�B����˹�f��ʹ�����a���^��ij�ʼ�������Ķ�������ϵ�y�����w���ȡ���ˣ���֧���Ĺ����l���ڸߴ�ͨ�ܶ��·����������͡�

�D6��a���p�ӹ�֧���ڲ�ͬ��ͨ�ܶ��µķ��ֵλ�ƺʹň����d�l�ʵ��Pϵ; ��b���p����������ͷ������Ҵň����l�����µ�λ�ƕr�̽Y��
����������������Y�����������ڸ���ͬ��ܛ����׃�����w�����Ĵ���푑�����ͨ�^�{��ʩ�ӵĴň�������M���{�ء���ˣ���������������{�C�p��������l�ʵĴň������{�ز��ԡ����w���ԣ����ڰ����㶨�ͽ�׃������ϴň��ĸ���ͬ��ܛ����׃�����w��֧�����ԣ���������˹�f���ʹ�ͨ�ܶ�ƽ�������ȵ����c����֧��������l�ʿ�ͨ�^��׃�㶨�ň��Ĵ�С���{�������o���׃������׃�ň����l�ʣ����Pģ�M�Y��Ҋ�D7����ԓ����Ԫ���������У���׃�ň��ļ����l���O�Þ�4 Hz���ڵ�һ�A�Σ��H����֧��ʩ�ӽ�׃�ň���������ķ��Bλ�ƕr�̽Y����FFT׃�Q�Y�������D�������R�D��D7b��7e��ʾ�����ڼ������c��ʩ�Ӵ�ͨ�ܶȵ�ƽ�������ȣ���һ�A��ϵ�y��������l�ʞ�8 Hz���ڵڶ��A�Σ������ڵ�һ�A�λ��A�������˷�ֵ�齻׃�ň��ı��ĺ㶨�ň���������ķ��Bλ�ƕr�̽Y���������~׃�Q�Y�������D�������R�DҊ�D7c��7f�����ڽ�׃/�㶨�ň�������С��ԓ�A��ϵ�y��������l�ʏ�8 Hz���͵�4 Hz�����F���p���C��ʧ���О飨Ҋ7c�е�λ�Ƹ����~׃�Q�Y����7f�е����D�����ڵ����A�Σ����㶨�ň��ı����pС���ڶ��A�ε�һ�룬�����ķ��Bλ�ƕr�̽Y���������~׃�Q�Y�������D�������R�DҊ�D7d��7g�����Կ��������A��λ��푑��г��F�������C���������ɴ˿�Ҋ�����^�ڂ��y�ľ��ԄӑBϵ�y�����ڸ���ͬ��ܛ����׃�����w�Ĵ���ϵ�y�������W�О���s��׃��������λ��푑����Hȡ�Q����ʩ�ӽ�׃�ň����l�ʣ�߀�ͺ㶨�ň��c��׃�ň�֮�g��������������P��

�D7��a����ͨ�ܶȺ��p����λ���S�r�g��׃����a���Լ���ͬ�ň�����l���µķ��Bλ�ƕr�̽Y���������~׃�Q�Y�������������D�������R�D��b������c������d������e������f������g�����D�е����η�̖������׃�ň�������l��
���о�������һ�N���͵ģ���ӳ����ͬ��ܛ����׃�����w������τ����W�О�ı���ģ�͡�����C��ԓģ��������Ԫ�����ϵ����_���a���о�ͨ�^����Ԫ�������������о����ɸ���ͬ��ܛ����׃�����w�Ͳ����ŏ����w�M�ɵ��p�ӑұ����Ĵ��ӄ����W�О飬��ʾ�ˑT�Ժ�ճ���Ԍ�����ͬ��ܛ����׃�����w�������Ĵ���׃���О��Ӱ푡����⣬ԓ�о�߀�������ɸ���ͬ��ܛ����׃�����w�Ͳ����ŏ����w�M�ɵ��p�ӹ�֧���ڴň������µĴ����������о���ʾ��������˹�f������Ӵň�����֮�g��ƽ�����Pϵ���Լ��ň��ĚW�����|�����µĸ���ͬ��ܛ����׃�����w�������ij��C��Ӻ������S�ȷǾ�����ӬF���⣬���������Y����������׃ֱ���ň��ͽ�׃�ň�֮�g�ı������Ԍ��F������ͬ��ܛ����׃�����w�����������W�О��`����{�����@Щ�l�F�����M�ˌ�ܛ����׃���ԄӑB�О�����⣬��ܛ����׃�����ڴň����I������H�����ƽ�˵�·��
ԭ��朽ӣ�Bochao Wang, Leif Kari, Haoming Pang, Xinglong Gong. Modelling the dynamic magnetic actuation of isotropic soft magnetorheological elastomers, International Journal of Mechanical Sciences, 2023: 108908
https://doi.org/10.1016/j.ijmecsci.2023.108908
