�����M(j��n)���a(ch��n)���˾��ж�N��֪���ܵĸ��X(ju��)���٣�ʹ���܉��֪�h(hu��n)����Ϣ�����C��Ķ�����ڸ��N�h(hu��n)���µ��������������У���(du��)��S�șC(j��)е�����|�X(ju��)��֪����ʹ��Ȅ�(d��ng)�������ɏ�(f��)�s�IJ����΄�(w��)����ˣ����N���ӵķ����|�X(ju��)��������������ӡ��˙C(j��)�������˹����ܵ��I(l��ng)��õ���(y��ng)�á������(l��i)�����ڴň�(ch��ng)���|�X(ju��)�������H���������͌�(sh��)�F(xi��n)�˶�S������֪����l(f��)չ?ji��)����õ��ˏV���P(gu��n)ע�����F(xi��n)���о�Ҳֻ�܌�(sh��)�F(xi��n)���S�����֪���������������Ę�(bi��o)���͙C(j��)���W(xu��)��(x��)��(sh��)�F(xi��n)���S����֪���b���^(gu��)���е�Сƫ�Ƽ���(hu��)ʧЧ�������˴��|�X(ju��)�������đ�(y��ng)����չ��
ᘌ�(du��)������(w��n)�}���㽭��W(xu��)�w�����/�����t��ʿ�n�}�M��(b��o)����һ�N�������S�������֪�����Ĵ��|�X(ju��)��������ͨ�^(gu��)�������S��-�ň�(ch��ng)������Փģ�����_(k��i)�l(f��)�˸߷�(w��n)�������Դ��w���ĴŻ��O(sh��)Ӌ(j��)�c�ۯB��ŷ�����ʹ��ԓ���|�X(ju��)�������H�����λ������������Ɍ�(sh��)�F(xi��n)��(du��)���S���Ľ����֪��ԓ����߀������ôň�(ch��ng)�o(w��)����ݔ?sh��)����c(di��n)��(du��)�������M(j��n)���˷��wʽ�O(sh��)Ӌ(j��)�����_(k��i)չ��ˮ�����ٸ�֪����չ��(y��ng)�ã�չʾ���ڷ��]�����ܷ���Ҫ��O�ߵĭh(hu��n)����(sh��)�F(xi��n)����(ch��ng)��֪�đ�(y��ng)�Ã�(y��u)��(sh��)�����P(gu��n)�о��ɹ��ԡ�Split-type magnetic soft tactile sensor with three-dimensional force decoupling�����}�l(f��)���ڡ�Advanced Materials���ϲ����x�ˮ�(d��ng)�ڲ��(y��)���]��Frontispiece�����㽭��W(xu��)�C(j��)е���̌W(xu��)Ժ�w�����ںͽ������W(xu��)���������t��ʿ��Փ�Ĺ�ͬͨӍ���ߣ��Tʿ���������������t��ʿ��Փ�Ĺ�ͬ��һ���ߣ�Փ�����߈F(tu��n)�(du��)�ɆT����(l��i)���㽭��W(xu��)���w��(d��ng)�����A(ch��)���c�C(j��)�ϵ�y(t��ng)ȫ��(gu��)���c(di��n)��(sh��)�(y��n)�ҡ�
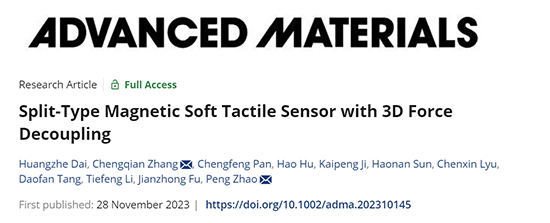
�D1 �������Ļ����Y(ji��)��(g��u)����

�D2 ����������ԭ���c��ͬ���Ĵ�-����(bi��o)��

�D3 ���m��(y��ng)ץ���c�u�U�ٿؑ�(y��ng)��
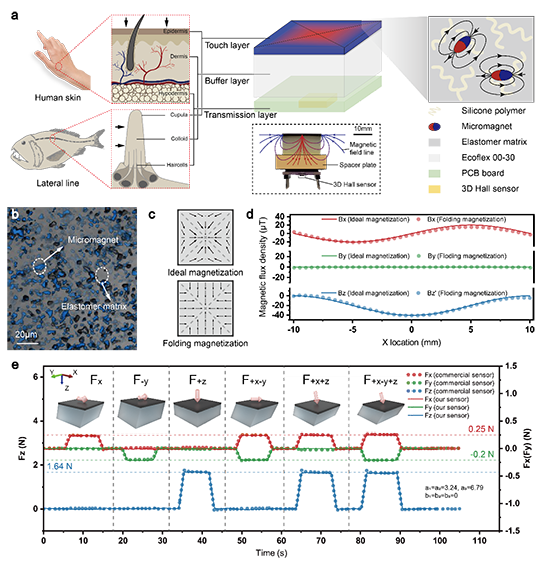
�D4 ���и�֪�ػ���(sh��)�F(xi��n)���ٸ�֪

�D5 ���ٜy(c��)���Č�(d��o)����(y��ng)��
�C�ϣ�ԓՓ�Ĉ�(b��o)����һ�N�������S�������֪�����Ĵ��|�X(ju��)��������ͨ�^(gu��)�������S������Փģ�͡��_(k��i)�l(f��)���ij�ŷ�ʽ��(sh��)�F(xi��n)�����S��������|�X(ju��)��֪�������ôł��Пo(w��)����ݔ?sh��)����c(di��n)��(sh��)�F(xi��n)�������ķ��wʽ���ٸ�֪�c��(d��o)����(y��ng)�á�ԓ���з���ʹ�|�X(ju��)�����������������Ƥ�w�ĸ�֪�S�ȣ������ʹ�ü�ʹ���w���b���^(gu��)���аl(f��)��ƫ�����f�o(w��)�茦(du��)�������M(j��n)������(bi��o)�������������������a(ch��n)�c��(y��ng)�õ����������ң����չʾ�����ڙC(j��)���˷����|�X(ju��)��֪���˙C(j��)�������I(l��ng)���Լ���O�˭h(hu��n)��������(ch��ng)��֪�đ�(y��ng)�Ý�����
ԭ��朽ӣ�https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202310145
�n�}�M�W(w��ng)վ��https://person.zju.edu.cn/pengzhao
- �A��������W(xu��)���ָ���ڈF(tu��n)�(du��) AFM���_(k��i)�l(f��)��һ�߸����Ժ߷�(w��n)���Եğo(w��)ɫ����������(f��)�ϱ�Ĥ 2025-07-11
- ���ϴ�W(xu��)Ƥ�������� Angew������ż��-��हǼܵ�COFs��Ĥ - ��߸߷�(w��n)�����c���ؑ�(y��ng)������ 2025-06-26
- ����O���桢��ܲ�F(tu��n)�(du��) Carbohyd. Polym.�����ڟo(w��)����̎������ӡˢ�·��ĸ߷�(w��n)���ԡ���ѭ�h(hu��n)�c�ɽ���Ŀ��潻(li��n)ˮ���� 2025-04-12
�\(ch��ng)���P(gu��n)ע�߷��ӿƼ�

- CPHI����չ��(sh��)�(y��n)�҃x���c�O(sh��)��...
- ���ܹ��A��朆���������22��...
- ����(b��o)���C(j��)��(hu��)��500+ˎ��...
- ��(gu��)�HƷ�ơ�ǰ�ؕ�(hu��)�h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ��(gu��)�a(ch��n)������٣����(gu��)���^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��(hu��)
- �Ј�(ch��ng)��300�|��PMEC China ɫ...
- ����ע��(c��)��2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �Ĵ���W(xu��)���A���ڈF(tu��n)�(du��)��Adv....
- �Ĵ���W(xu��)���������ڈF(tu��n)�(du��) Ang...
- �A��������W(xu��)���ָ���ڈF(tu��n)�(du��)...
- �칤����x/�R�w�R/���ƽ� S...
- �A���r(n��ng)�����/������...
- �Ʊ��ҽ���/�֘s�I(y��)���ڈF(tu��n)�(du��)...
- ��ӿƴ����|��/�������F(tu��n)�(du��)...
- �A������������� Angew: ...
- �Ĵ���W(xu��)������ AFM������ʯ...
- ��۳��д�W(xu��)�����n�}�M CEJ...
- �Ї�(gu��)�ƴ����d���n�}�M���邐...