�S����Ӽ��g(sh��)���˹����ܵİl(f��)չ�����Ԃ����������Ƥ�w���ɴ����O(sh��)�䡢ܛ�C(j��)���˵ȶ�N��(y��ng)����������Խ��Խ����dȤ��Ŀǰ���ш�������Ԃ����������ͨ�^�����Ԍ�(d��o)늲��Ϸ�ɢ�������w���w���Ϳ�������ԏ����w�������Ƃ���ɵġ�Ȼ�������ڄ��Ԍ�(d��o)늲����c���ԏ����w���w֮�g��ģ���������������(d��o)늾W(w��ng)�j(lu��)���Ѻͻ��ӵȓp������(d��o)�����Ԃ������ķ�(w��n)���Խ��͡����⣬���(q��)�Ӿ��зǽ��|�ԡ����ԡ��h(yu��n)�̿��Ƶȃ�(y��u)�c��ʹ�û��ڴ��(q��)�ӵ�ܛ�C(j��)�����ܵ�Խ��Խ����P(gu��n)ע������ڂ��y(t��ng)���ɴ����w��ֱ�ӷ�ɢ�ڏ����w���w���Ƴɵď�(f��)�ϲ��ϣ�����׃Һ�д����w���ڴň��µ��\(y��n)�Ӳ������ܵ����ƣ����F(xi��n)���ܸߵĴ���׃Ч��(y��ng)��Ŀǰ���ڴ���׃Һ��ܛ��(f��)�ϲ����ձ�ȱ�����������������Ќ����ṩ�h(hu��n)����Ϣ�͌��F(xi��n)���_���Ʒdz���Ҫ��

�D1.ժҪ�D
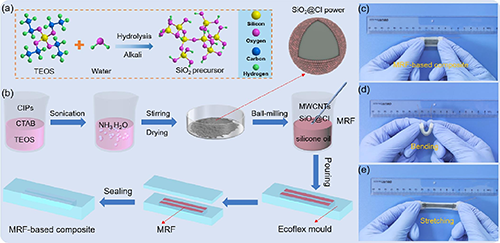
�D2.��(d��o)늴���׃Һ���ܛ���ԏ�(f��)�ϲ��ϣ�cMFEC�����Ƃ��^�̺͌���D
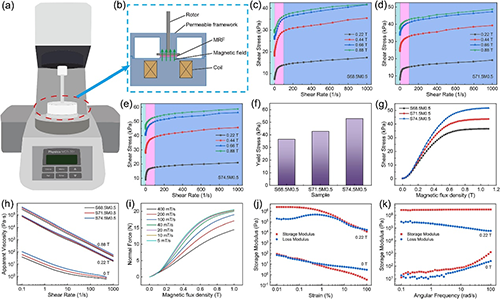


�D5. ��(f��)�ϲ���cMFEC�Ĵſ��{(di��o)��(ji��)����

�D6.��(f��)�ϲ���cMFEC�Ĵ����О�

�Y(ji��)�Ϗ�(f��)�ϲ���cMFEC�Ă��������ʹ��(q��)���О飬�O(sh��)Ӌ�����ܴ��ӊA�����Č��r�O(ji��n)�yϵ�y(t��ng)���D7a����ͨ�^���ץȡ���D(zhu��n)�ƺ�ጷŌ����Y(ji��)��cMFEC������(y��ng)�����^���еĂ�����̖׃��Ҏ(gu��)�ɡ��_ʼ�r��cMFEC�Aצ̎����Ȼ��B(t��i)��������̖���ַ�(w��n)�������ƄӴ��F���ƊA����ץס���w��˲�g�����ڴň��͏���׃�ε����ã�������̖�������ӡ����D(zhu��n)�����w���^���У�������̖��u�p������ጷ����w��˲�g��������̖�ٴ�Ѹ�������S����u���䵽�ӽ���ʼֵ���D7c����������̖����һ���ķ�(w��n)���ԣ�����ͨ�^���r�^��cMFEC������̖��׃�����O(ji��n)�y���܊A������ץȡ���D(zhu��n)�ƺ�ጷń�����
ԭ��朽ӣ�
Yuxi Sun, Min Sang, Yunqi Xu, Zhentao Zhang, Shilong Duan, Yu Wang, and Xinglong Gong, Conductive Magnetorheological Fluid (cMRF)-Based Flexible Sensor with Adjustable Stiffness for Magneto-Mechanical Dual-Response and Soft Actuator, Chemical Engineering Journal, 2024, 489: 151229. DOI: 10.1016/j.cej.2024.151229.
https://doi.org/10.1016/j.cej.2024.151229
- ���������۽��ѡ�������F(tu��n)ꠡ�Sci. Adv.�����_�l(f��)�������|�l(f��)׃��������ճ���Y(ji��)��(g��u) 2023-03-25
- �Ϸ��Ƽ���W(xu��)�����w���ڈF(tu��n)� Matter�����Ԃ�����������ͻ�� - ����(x��)���x��(qi��ng)�gճ���c���`����֪ 2025-07-01
- ���|��W(xu��)������ Small���C(j��)���W(xu��)��(x��)�o���ı�����Ԅ�����(qi��ng)�Ϳ���Ûˮ���z���Ԃ���������ˮ���ք��R�e 2025-05-26
- ����������W(xu��)���겨���� AFM��Ƥ�w���|(zh��)�ӆ��l(f��)�ı������������x��ˮ���z�����������Ԃ����� 2025-04-14
- �A�ώ����� JCIS���Ծ۶�Ͱ������w�S�ؼ{����MXene����{������(qi��ng)���ϵ�Һ�������w������ܛ���� 2025-05-12
- ���������G���ڈF(tu��n)ꠡ�Mater. Horiz.�������^խ��푑�(y��ng)�ضȅ^(q��)�g��(n��i)�ʬF(xi��n)��(y��u)���Ŀ����(q��)�����Ե��p���Π�ӛ���ۺ��� 2023-04-23
- �|����W(xu��)��Ц���Ұ�n�}�M CEJ�������ݶȽY(ji��)��(g��u)ܛ���� - ���Ƃ䵽��(y��ng)�� 2023-02-20
�\���P(gu��n)ע�߷��ӿƼ�

- ���ܹ��A��朆���������22��...
- �������C(j��)����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �Ї��ƴ����d���n�}�M���邐...
- �A��������W(xu��)���V�ա����ݴ�...
- �A�ώ����� Small���w�S��...
- �K���־�h(yu��n)/�������K��һ...
- ���������W(xu��)�����¡��S�؈F(tu��n)...
- �㽭��W(xu��)�߳����ڈF(tu��n)� ��Nat...
- ���д����ڣ��Ʊ��ҡ�����...
- �������/˾һ�����۳Ǵ�...
- ����W(xu��)�����h(yu��n)���ڈF(tu��n)� AFM...
- ��ɽ��W(xu��)����n�}�M CEJ����...
- ���ݴ�W(xu��)�����ƽ��ڈF(tu��n)ꠡ�Ac...