���ش�W�_���x�����T��W�ܱ����n�}�M Mater. Horiz.�����ڴ�푑��wë������픵��pģ�B���Ƥ�w
���Ƥ�w��E-skin����ģ�M��й�ϵ�y���ڼ�֫���˙C�������t�������O�y�����������ஔ����Pע��Ȼ������ȫģ�MƤ�w������Ȼ���������ԣ����Ƥ�w���ܿ��Է��x�̼���������/�����������|/�ǽ��|�О飬�Լ������lݔ��ķ��������b�ڴˣ����ش�W�_���x�F��c���T��W�ܱ���F��������_�l��һ�N���ڷ���ë�l-��Ƥ-��Ƥ-Ƥ�½M���Y����ȫ�������Ƥ�w��FBE-skin�������ڶ�S�|�X��֪����D1��ʾ������ͨ�^����������wƤ�w���OӋ�������Ż��wë��MMCA��������픣�MDA��������늘O���������ë�l�ӡ���Ƥ-��Ƥ�Ӻ�RA/SA���w��ͨ�^�����wë�͌���A픵��ΑB�ʹ�/����ܣ�ԓ�����Mһ����������϶��½Y���и������Ă������ܡ�
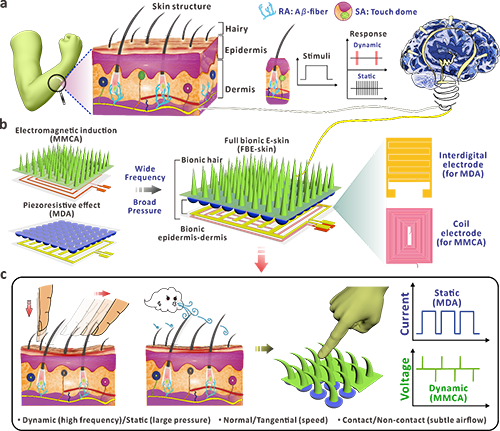
�D1. (a) ����ë-��Ƥ-��Ƥ�ӵ����wƤ�w�����ڄ��o�B�̼��z�y��RA/SA�Cе�������ĸ���D��(b) ͨ�^늴�Ԫ����MMCA���͉���Ԫ����MDA����������Ƥ�w�OӋ��(c) ���Ƥ�wģ�M���Ƥ�w���F�o�B�̈́ӑB푑��Ķ�S�Cе��֪ʾ��D��
����ͨ�^�ΑB�{�غʹŻ�����������MMCA�����܉���l�ʸ��_100 Hz�ĄӑBݔ���ṩ�ɿ���늷��������⣬�����ʽMDA�M���M���˃�����ʹ���܉���96.6 kPa-1�ĸ��`���Ⱦ��ԙz�y���_100 kPa���o�B������ԓ�b�û���늴ŸБ���MMCA���͉���Ч����MDA�����pģ���ЙC�ƣ�����ģ�MSA��RA���w��푑������F���ӑB���o�B�ⲿ�Cе�̼���ͬ�r�O�y��MMCA�M�����^С�ĉ��������ȹ���������푑����l�̼�����MDA�M���ڵ��l�r���и����ĉ���푑���������D2��ʾ��MMCA��MDA���϶��µ�������һ�N�a��ͺ����ķ�ʽ���ⲿ�Cе�̼������ã������|��/ጷŕr�̡��Cе���m�r�g�ͻ����ٶ�/������/�����Լ����|/�ǽ��|��͵Ķ�S�Cе��̖��

�D2. (a) ����FBE-skin�Ĺ�W�D�������չʾ��(b) �l�ʞ�3 Hz ~ 30 Hz��������800 Pa�r��FBE-skin��푑���(c) ������������MMCA��MDA��׃��ʾ��D����ʩ�Ӊ����r�������늉���̖����(d)�г��m�r�g�� (e)�o���m�r�g��(f) �ճ��Cе�̼���ʾ��D��������ָ���Ӻ͚������½���FBE-skin�ΑB׃�Σ�(g) ���|�wë�Ӷ���ʹ�Y��׃�Εr,��ָ����FBE-skin��푑�������(h) FBE-skin��¶�ڷ���͂�������r��푑�������
���w��ϵ�y�܉��֪���^Ƥ�w���������Cе�̼����e�ǣ����wƤ�w�Ϸֲ���ë�l�����S�R�e��ֱ����������Ƥ�ӵ�ݔ����Ϣ���@�N��֪�������H��ӳ��ݔ�돊�ȣ�߀ʹ���w�܉��R�e�ӑBݔ��Ļ��ӷ�����Ƅ��ٶȵ���Ϣ���D3a�����ܴˆ��l���҂��_�l�����������S��ҕ��ϵ�y��ͨ�^�������̖������a�������W�d�ɣ����F���X���ֻ����D3b������ԓ4×4���ϵ�y�У�16��FBE-skin��Ԫ�M�����S��ҕ�����棬����ͬ�r�ɼ����@ʾ늉������֧·���pģ��̖��������ģ�M�����wƤ�w��Ƥ�w���|ǰ�Ľ��˸�֪�����Cе���ȵ��R�e���D3g-i�����O�y����ݔ��Ļ����ٶȺͷ��D3c-e���Լ��������Ŀ��g�ֲ����D3f���ȡ����⣬����늴ŸБ�ԭ����߀����ֱ�ӏ�늉��D���^�컬���ٶȼ�����늉��ֲ��ؘ��Ě������g�ֲ�������ģ�M����FBE-skin��3Dҕ�X��a�������҂�������O���м���������16����̖�������ڌ��к��|���l��������̖������չʾ�˸����w��Ԕ�����о������Լ�����ʽ���È�����
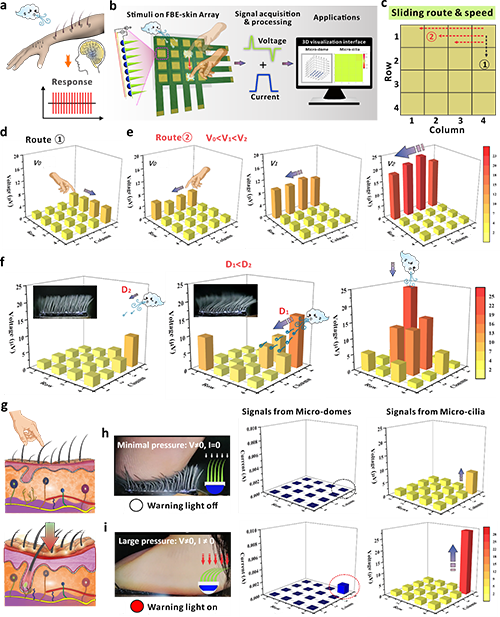
�D3. (a) ���wƤ�w���ڴ���ë�Ӷ���֪����Cе�̼���ʾ��D; (b) ����FBE-skin��еĸйٽ�a�����S��ҕ��ϵ�y����D; (c) �����R�e��ͬ�����ٶȺ�·�������ʾ��D; (d)��ָ��·���ټ�V0�ٶȻ��ӕr���S��ҕ��ϵ�y��푑�; (e) �ڲ�ͬ�ٶ��£���¶��·������ָ���ӕr��푑���(f) FBE-skin�ڄӑB���������µ�푑�; (g) ���wëʩ���p���ϣ����^��������Ƥ�w���@׃�Σ��£���ʾ��D��(h) ��FBE-skin���ʩ����С�����r��ҕ��ϵ�y��푑���(i) ��FBE-skinʩ���^�����r��ҕ��ϵ�y�ľ�ʾ푑���
���P�о��ɹ��ԡ�Top-down Architecture of Magnetized Micro-cilia and Conductive Micro-domes as Full Bionic Electronic Skin for De-coupled Multidimensional Tactile Perception�����}�l���ڡ�Materials Horizons�������µ�һ���ߞ���T��W�c���ش�W�����B��ʿ�����P�Q��ԓ�����ܵ��˰��T�ƌW���g�lչ����006/2022/ALC and 0057/2023/RIB2���ȵĽ��M֧�֡�
ԭ��朽ӣ�https://doi.org/10.1039/d4mh01217h
