
������ʾһ�N������ݡ��ɿؙC���˽Y���w��ȫ�·������о��ˆT������һ���܉������ۯB�����ӡ����~�ͺ��ǵ� 3D ģ�͡��@Щ����������ڟ�ˮ֮����ƽ����ʽ���ۯB������
Cynthia Sung ֮ǰ������ʡ�����WԺ Daniela Rus �F꠵�һ�T������ѽ��ɞ����eϦ���၆��W��һ�����ڡ����ܶ����ڙC�����c�Ԅӻ������ICRA���ϣ���չʾ��һ����������ҿɿؙC���˽Y���w��ȫ�·��������Q֮�鸽�����ۯB���g���ܵ��ۼ��ֹ��Ć��l��ԓ���g�������þ߂����ۯB���ܵ� 2D ���τ��� 3D �Π��������Ҫ���ģ����ǰ��������M��ˮ�T�ɡ�
����Ҫ���OӋ��һ������� 3D ģ�ͣ�Ȼ��ʹ��ܛ���ь����D���ɞ�ܶͬ�Čӣ�����ÿһ�Ӷ���Ҫ�͌�������һ�Ӽ���һ��ϵ��һ�𣬵��DžsҪ��һ�c�ۯBƤ�ꡣһ�����ѽ��ʂ�������е��OӋ����Ϳ���ʹ��һ����ϩ�и�C��һ����֬��Ĥ�;�����ϩ�ġ������Ρ��ϴ�ӡ������
���ۯB֮ǰ�������ȵõ��Ŀ��ܕ���һ�����ڴ��������� 3D �����B�әM����ġ����L���ݵėl��������һ����������M��һ���ӽ����v�ğ�ˮ�������ϩ��PVC���͕��ܟᣬȻ��ÿһ����λ�������տs��Ȼ��ֻ��̶̎���犣�����׃���A���O���õ��Π
���H��ˣ�ԓܛ��߀����һ�����ܣ��������OӋ����ȼ���һ�N���^�������ԡ���ʹ�õ��Ǻ���~��һ�ӵ�ԭ���ϣ����@�ӵ�Ч�����ǣ���һ�ȱ����⣬��һ�Ⱦ͕������𣬏Ķ��γ�һ���ܿ�������
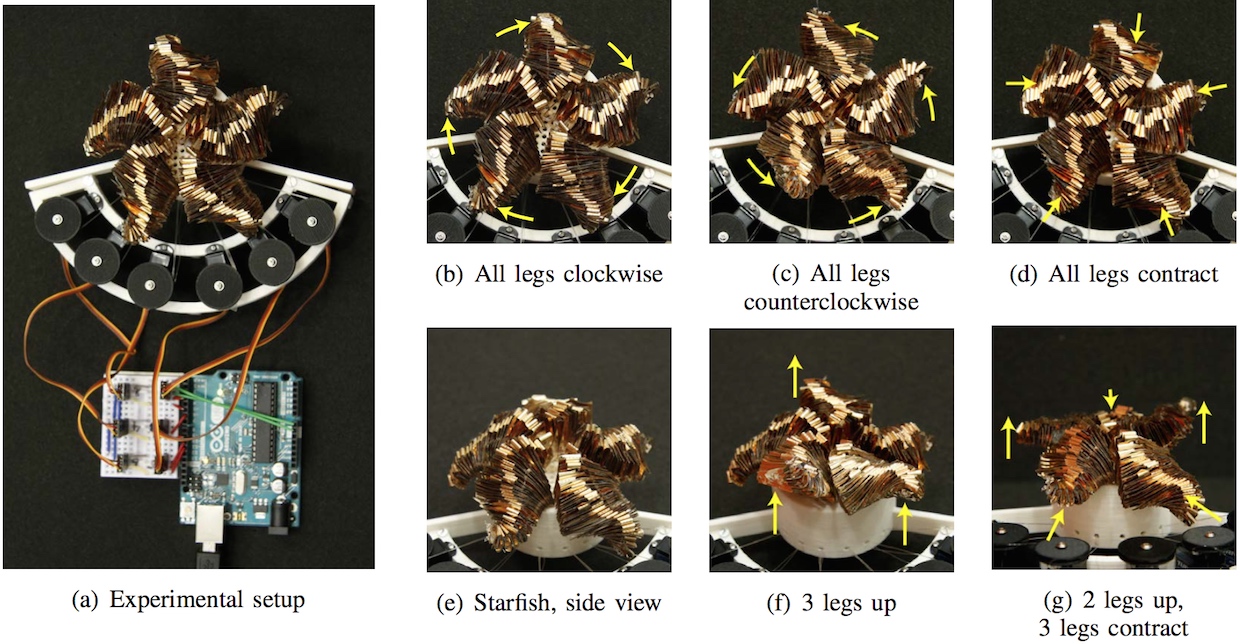
�@Щ�о��ˆTʹ�����܉����Ҹ����ۯB���ܵĽ�Q������������һ�������ĺ���ģ�ͣ��Da�����@��ģ�͓��п��ŷ�늙C���Ƶ����w�����S����в�ͬ���ƶˣ��D b-g����
�C���˺�����������l�ȣ������傀�P���У�ÿһ����ʹ�����Ă��ݽz���Ӄɂ��S���ƶˡ�����ÿһ�����ǵ��ȴ�sֻ��Ҫ 50 ��犣�����IJ���Ҫ���]̫�������\�ӷ�����ͨ�^������M����һ�����е��Ⱦ�������������C���ƣ�����형rᘻ�����rᘷ�������ͬ�rҲ�܌��M���еăɗl�����l�����ϻ���������������@����Q�������õ�һ����ָ�ٿ����ϣ��������OӋһ�����ǣ���ȕ��l�]�������;��
�����@����Q�����������������s�ęC���ˣ��e�Ǯ�����Ҫ����һЩ���������w�e��Ҫ�����ƵęC������r�£���������һЩ��̫�����Ы@����̽�y�l����ʹ�õęC���ˣ������������ٶȕ�׃�ø��죬����Ҳ�����Ӻ��Ρ�����Ҫ���ģ�ֻ��y��һЩ���Ϻ��и�����Ȼ���������Ҫ�ęC�����OӋ�ã������������������⡱Ȼ��Ҫ�õĕr��һ��ӡ������ʹ�á�
�о��ˆT����̽���������^����Ƕ�뼡������P��Q�������mȻ�@�N�������ܕ���������׃����һ�c���s�����Džs�����w�����ٶȫ@���@��������
