��ǰ��Ӣ�������ڿ���Nature���ϰl����һ���ɵ��R������ϵ�y�о������ƵĴſ�ܛ�w�C���ˣ��܉��M�в�ͬ��ʽ���\�ӡ�
�@��һ���L3.7���ס���1.5���ס���185���L���w�C���ˡ��eС���@������Ͽ������ں�����С��Ƭ�������ڴň��Ŀ����£���ܛ�w����һ����ɸ��Nָ��������������ˮ�»�ˮ����Ӿ�����ɈAȦ�L�ӡ����^�ϵK��ڼ��������У��`���ГQ���N�\����ʽ�ȵȡ�
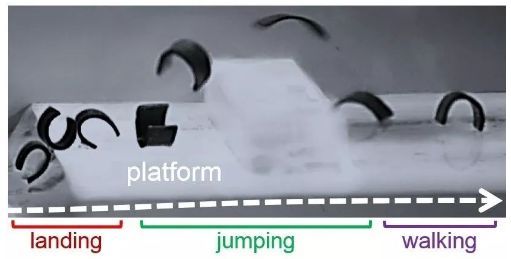
�@��C���˵����w���Ϟ���z����Ƕ���д��Ե����F���w�����w����ƽ��ֱ����5�ס��C���˱����Ƿ�ˮ�ģ�Ҳ���Ա�̎�����������ݲ��ϡ��C�������ȱ��O���Ɇβ��L�C�������棬�������S�r�g׃���Ĵň������¸�׃�������ΑB�����ܸ������εIJ�ͬ�a����ͬ���\��ģʽ��
�����@��C���˾��пɿ��ԣ�������������Ŀ���������b؛���\؛��ж؛�IJ�����δ�����ԑ���������˰���ˎ����\ݔ��

�@��C�����܉��m���ڲ�ͬ���α��F�ںܶ�棬������ͨ�^�MС���g�r��������ëë�xһ�Ӯa���������ӣ����Mȥ��

��ˮ��ͨ�^��C�κ�V��֮�g׃�Q�ˑB����ˮĸһ�ӌW����Ӿ��������߅�r�C���˿��Ա���C�����D�L�xˮ�档ֵ��һ����ǣ���L�ӵı��FҲ���ڌWëë�x��ܲ�ʳ�ߕr�Ą�����

�����������^�ߵ��ϵK��r��߀�����x�����S�ķ�ʽ����֮�����@ʾԓܛ�w�C�����ڸ��N��Ҏ�t�h���еĹ����������о��ˆT�C�����_���˶�N�\��ģʽ̽��ˮ��p�����������θ��ģ�ͣ����~�������ץȡ���w�������D�Ƶ��΄ա�

����˼���ǣ�С���ڲ���@��ܛ�w�C���˵����P�Y�ϕr��߀������ի@���R������ϵ�y�о��������@��ܛ�w�C���˵Ĵ����^�̡���ô�f���@���^����O�˺ܶ�Ů�����{��һ���ĩ��Ĥ�r�Ą������^�����@�ӵģ����m�����z�����F���w�����������У��Ô�����䔇�������ɞ���Ը����r�������ͿĨ���И˶���ȵIJ������ϡ�����������ɺ�������ڼ���Ĺ��ߣ��ʴ_���и����Ҫ�ijߴ硣

�и��꣬�Ϳ�������ӌ������IJ���ȡ���ˡ�
���ԣ����ꌍ�w�������^�̣�����l�F���@��C���˵ļ��g�P�Iò�Ʋ������������һ���������x�ϵęC���ˣ���������ξ��ʵĿ����@ֻ�C���ˡ�Ҫ�a�����ӵĴň����ܿ����@ֻ�C�������������Ą����أ�С����Ҳ�ڴ��д����ܳ������һ�°���
��֮�������w�Ȳ���Ҫ�κ��������A�����\�ӵ�ܛ�w�C���ˣ����w���t���C���ˁ��f��һ���ܺõ��о�����ֻ�����w�Ȳ��h���O����s����Ҫ�����_������ˮƽ߀�������ض����h�������^�@헹��̌WՓ��������ڡ�Nature���ϣ�Ҳ�ܿ������о�����Ҫ���x��
