���գ������W�ƌW�҄����һ�N����ܛ�w�C����ʹ�������[��Ƥ��ǰ�Ƅӣ��@���������c���ߡ��@��ܛ�w�C�����䌍��һ�������z�ܡ���������֮̎�������ġ�Ƥ�w�� - һ�N�ü����и�ı��������������Ƭ��
�����λ�A�ε��п��������Ƥ�ϵ��[Ƭ��
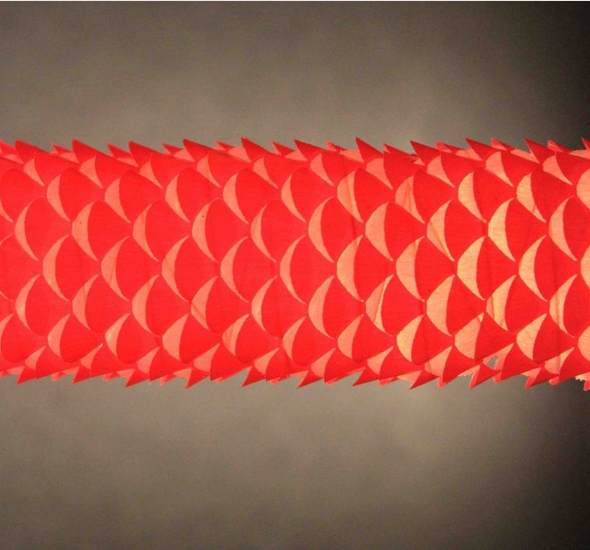
���՚ⱻ����܃ȕr���C���˕���Û���տs���Ķ�ʹ���[Ƭ�������^���ڱ����ϣ������C������ǰ�����������l���ڡ��ƌW·�C���ˌW��(Science Robotics)��һ��о��У��ƌW�҂�������������Ƥ���Եֿ���r��ͻ������@�ӵĴֲڱ��档�������@Щ�C���˿��ܕ��sС�������ڄ��}��ݔ��ˎ������ڙC������Ҫ�ڪMխ���g�����еĞ��y��r�¡�

��ǰ�ƌW���ѽ��ܴ���Ȼ���l�аl�˸��N�C���ˡ��˴�ܛ�w�C���˵��`�Ё����ߡ�����ģ����Ƥ�������W��ʿ���о��T Ahmad Rafsanjani�������ձ��Q��kirigami�ļ���ˇ�g�����ü����и�ɾ��l�������Ρ��A�λ����εı�����Ƭ��Ȼ��Ƥ�w�p�@���ɿ՚��ӵĹ����z������ ���՚�ͨ�^�ܵ����ͣ��������ڎ��бã�늳غ͂�������С�Ϳ��Ɔ�Ԫ����

�C�������@�N��ʽ�������������z�ܳ���Ś�r������ǰ��չ��ʹ�[Ƭ����ץס���档�^���Юa����Ħ���ƄәC����ǰ�M�����������;�о��ˆT��Ȼԇ�DŪ��������[ƬƤ���������������ҿ���ʡ�Թ��̎������������Ԍ��F�Ƅӵď��s���E��Rafsanjani������ͬ��Ҳ�Lԇ�˲�ͬ�ı����Π��������������Ч�ģ����S���L�IJ�����
�@���C�ƿ������ܺ��Σ������H�ϻ���һ���ĕr�g�ŵ������ơ���ȫ�����}�õ���Q֮ǰ��Rafsanjani�����˔��ق�Ƥ�w�ͼs50��ܛ�C���ˌ��F�@��һ�����εĄ�����
Փ��朽ӣ�http://robotics.sciencemag.org/content/3/15/eaar7555.full
- �����������܈F� Adv. Sci.���ܿ�܉���l�ĭh������� 2025-04-30
- ������܊��/�܊μ���ڈF� Adv. Sci.����ܭh����֬�о������Mչ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ��������ʎ���������ܛ�w�C���� 2024-10-26
- �Ї��ƴ����d�����ڈF� Small�����湤���o��3D��ӡ�����z�ͺϲ��� - �fͬ�������_�������c늴Ÿɔ_����Ч�� 2025-05-01
- �A��������W�����A���ڈF� CEJ�����д�ֱ���нY���ĸߌ��Ꮚ늴�����̼�w�S/�����z�ͺϲ��� 2024-04-29
- �����֘I��W�߂����ڈF� Chem. Eng. J.����ľ��Ϳ�ó���������˪�� 2023-12-20
- �Ї��ƴ���Ƙ�/�uꐈF� JACS�������ӄӑB���������ڻ�����ϵ��������� 2025-07-05
