��ǰ���|�ϴ�W(xu��)���W(xu��)�����W(xu��)Ժ�������n�}�M�ڹ��ܛ�w�C(j��)�����о��I(l��ng)��ȡ����Ҫ�M(j��n)չ�����ЈF(tu��n)�(du��)��(b��o)����һ�N���ÿ�Ҋ�ͼt������(g��)���εĹ�ȥ�ٿ�ܛ�w�C(j��)�����\(y��n)��(d��ng)������{(di��o)�Ʋ��ԡ��о��ɹ��l(f��)���ڇ��H피�(j��)�ڿ�����ȻͨӍ���s־�ϡ�
���ܛ�w�C(j��)���������ܷ����C(j��)�����о��I(l��ng)��ğ��c(di��n)����Ȼ������Ό�(sh��)�F(xi��n)ܛ�w�C(j��)�����\(y��n)��(d��ng)����ı���{(di��o)�أ���ԓ�I(l��ng)��Ŀǰ�����Q��һ��(g��)�P(gu��n)�I�ƌW(xu��)�Ԇ��}�����y(t��ng)�Ĺ�̼��{(di��o)�ط�����Ҫ������������ܛ�w�C(j��)���˵�ij��(g��)�ֲ��^(q��)������ij��(g��)�ǶȻ���ȥ����ܛ�w�C(j��)���ˣ�ʹ֮�a(ch��n)���ֲ�����׃����M(j��n)���Ƅ�(d��ng)ܛ�w�C(j��)������ij��(g��)����ǰ�M(j��n)�����磬���īI(xi��n)�н�(j��ng)�������Ĉ����ǣ�������������ܛ�w�C(j��)���˵��^����ʹ����ˣ�������β����ʹ��ǰ�M(j��n)���������Ғ���ܛ�w�C(j��)���ˣ�ʹ���ҹգ���������ߣ�ʹ�����D(zhu��n)�����̼��{(di��o)�ط�ȱ������ԣ��dz������㡣
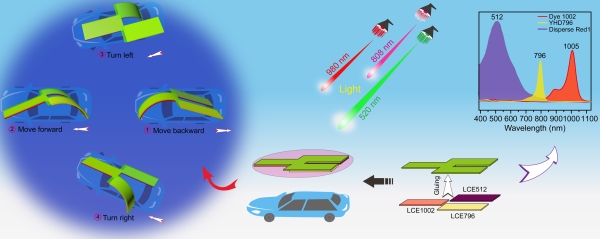
�|����ЈF(tu��n)�(du��)�����菽����(g��u)���˶��ӴνY(ji��)��(g��u)��Һ�������w��ܛ�w�C(j��)���ˣ��ڲ�ͬ�ĽY(ji��)��(g��u)�Ӵ��м������N�քe��(du��)520nm��808nm��980nm���ι�Դ푑�(y��ng)���һ����ɔ_���ЙC(j��)����D(zhu��n)�Qԇ�����Ķ����ÿ�Ҋ�ͼt������(g��)���ι���_/�P(gu��n)׃��ȥ�ٿ�ܛ�w�C(j��)���˵��\(y��n)��(d��ng)���͂��y(t��ng)�Ĺ�̼��{(di��o)�ط���ȣ�ԓ������ͨ�^ܛ�w�C(j��)���˲�ͬ�^(q��)��?q��)���̼����x�������գ��팍(sh��)�F(xi��n)���w����׃����M(j��n)���Ƅ�(d��ng)ܛ�w�C(j��)�����\(y��n)��(d��ng)����˹�Դ������λ�á����Ƕȵ����ض�����(hu��)��(du��)�\(y��n)��(d��ng)����a(ch��n)��������Ӱ푡�ԓ���Ԟ錍(sh��)�F(xi��n)ܛ�w�C(j��)�����\(y��n)��(d��ng)����ı���{(di��o)���ṩ����˼·��Փ�ĵ�һ���ߞ�2016��(j��)��ʿ����ͬ�W(xu��)��
- ͬ��(j��)��W(xu��)�����h/�A�|���������x JACS����س����Ӿۺ����ЈAƫ��l(f��)��Ŀ����ГQ�C(j��)�� 2024-12-03
- �K�ݴ�W(xu��)�ɽ�ƽ���ڈF(tu��n)�(du��) JACS����λ�ۺ���ξ�ƽ�_(t��i)�й�ظ߷��ӾۺϷ���(y��ng)���y���߾���Ćξ��Y(ji��)��(g��u)������Ĺ��C(j��)е�\(y��n)��(d��ng) 2024-09-04
- ������÷ؑ�����n�}�M Angew����ؿ��ГQ�[���ί� ���Ĺ��(d��ng)��/��ᵽ�LЧ����(d��ng)���ί� 2024-04-10
- �����������܈F(tu��n)�(du��) Adv. Sci.���ܿ�܉���l(f��)�ĭh(hu��n)����(q��)��(d��ng)�� 2025-04-30
- ������܊��/�܊μ���ڈF(tu��n)�(du��) Adv. Sci.����ܭh(hu��n)����֬�о������M(j��n)չ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ�����(q��)��(d��ng)��ʎ���������ܛ�w�C(j��)���� 2024-10-26
- ɽ�|��W(xu��)���/�K�ݼ{��������_/���ƴ�W(xu��)����Ӣ Small���˹������(q��)��(d��ng)��ȫ����������Ƥ�w��ֱ�X���|�X�pģ�����������ܲ��ϸ�֪ 2023-12-01
�\���P(gu��n)ע�߷��ӿƼ�

- ����(b��o)���C(j��)��(hu��)��500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ�(hu��)�h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c(di��n)������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��(hu��)
- �Ј���300�|��PMEC China ɫ...
- ����ע��(c��)��2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �����ϸ��Լ��ӹ����g(sh��)Ҫ�I(l��ng)��...
- �Ї��ƴ���Ƙ�/���������...
- �B�T��W(xu��)������ڈF(tu��n)�(du��) AFM��...
- �Ľ�ƽ�����A�ƴ�F(tu��n)�(du��)ţȽ��...
- ̫ԭ������W(xu��)�����ֽ��� Adv...
- ����κ�ܽ��ڈF(tu��n)�(du��) CEJ������...
- �Ϸ��Ƽ���W(xu��)�����w���ڈF(tu��n)�(du��)...
- ���ϴ�W(xu��)������/����Ⱥ/����...
- ̫ԭ������W(xu��)�~���/��ʯ��...
- ���_������W(xu��)/�����ش�W(xu��) CR...
- ��h��W(xu��)ꐳ������߶���/��...
- ��ƴ��R��l(f��)�݈F(tu��n)�(du��) AFM��...