�o����ܛ�w�C����ָ���ǿ��Ը�����̎�ĵ����h������������ĸ�׃��Y�������^�������\��������׃�������͂��Мy��������һC���ˡ����������t�W�I��Ͱ�ȫ�I��Ҳ�����Լ����еă��ݡ��������t�W�I�o����ܛ�w�C�����ڿɿ�ˎ��ጷ��Լ�ֲ��ʽ�t���C���˵ȷ���������ĝ�������ܛ�w�C���˿���ͨ�^ע�䷽ʽ�SѪҺ�M��Ѫ�ܣ���������Ԫ���Ͱ��dˎ���ѪҺ��Ѫ�ܵ��M�Мy�������F���c�ɿ�ˎ��ጷŵȹ��ܡ���ȫ�I�o����ܛ�w�C���������M����o���M�����Σ�U�ĭh���������h�������������W���������̖�M�Йz�y���h���m���������������U��̽�����ɲ顢܊�°�ȫ�I����ЏV���đ���ǰ����
������Ӽ��g������lչѸ�١���������������г��������ԡ�����չ���Ƥ�w���ԣ����������ɵ�Ԫ���ṩ���s�Ĺ��ܣ�����У��@ʾ��Ӌ���Լ������ռ��ʹ惦�ȡ��������������Ҫ�N���ڻ��������ЙC�w���C������ӮaƷ�Ϲ������@Щ����������λ�ù̶������ӷ������ޡ�����Ȼ��ˮĸ�������ЙCܛ�w�Ć��l��ܛ�w�C���˿���ͨ�^���͵��Π��׃�M�п���׃�Σ�ͬ�r���Ԍ��F�\�ӡ�ץȡ���\ݔ���|�X�Б��ȹ��ܡ�Ȼ���F��ܛ�w�C���˵��@Щ���܌��F��Ҫ��ه�ڂ��y�Ą��Ԃ���Ԫ�����·��߀�]�������C�w�����·��ȫ���Ԙ��졣�����һ�Nȫ��Ĺ���ܛ�w�C����ؽ�����F���ԝM��F�������a����Ķ�Ԫ������
ᘌ����φ��}������W���x�WԺ�����t�W������ӌ���ҵ��S�@��������Ȼ�������w�O����ܛ��ˮĸ��݆�x��ǻ�c�����������Ć��l���Y��������ӵ��о����������һ�Nȫ�µğo����ܛ�w�C����-����Һ�Σ�����Һ�κ���������������F�ˏ��s�h���C����ݔ�͡��\�ӡ�׃�Ρ����Мy���Ͷ��΄Ո��У��D1a�����о��F�����Һ�ε���ܛ�o�������Ժ�������������ij�����ܛ���ԣ�������һ�N���͵�ܛ�w�C����-����Һ�Σ��״Ό��F��ܛ�w�C�����\���d�w���ܜy��������ȫ���Ի��Ϳɾ��̿��ơ���ԓ�о��У��F����{�ӹ����g���������������С��10�ף������������������D1b��������Һ�θ����ͱ��揈�������ԣ���������������Ҹ���Һ�α��棬ͨ�^��׃Һ�ηN������OӋ���D1c,d,e�������F��ͬ�h���Ϳ��Ɨl��������Һ�ε��\�ӡ�׃�κ͂��Мy���ȹ��ܡ�

�D1����Һ�λ�������D
�о��F���ˮҺ���Г��������������F�{���w�����ڴň��l�������£�����Һ�ο�����226cm/min���ٶ��M�пɾ��̻��\�ӣ��D2a�����\���^���У�������С�A�p�������r������Һ�ο��ԑ{��ȫ���Ի����죬��׃�����Π�ͨ�^�ϵK����_ָ��λ�ú�߀���Ի֏ͳ�ԭ�����Πչ�F�����õ��\�Ӻ�׃�����ԡ����H��ˣ����h����׃�r���՚���|�D�����Խ��|��������Һ�ν�����ˮ������ԭ�������f���������ԭh���������\�ӣ��D2a,b,c,d,e�����ڴ��\�Ӻͭh���m�������Ļ��A�ϣ�����Һ�ο��Ԍ��������Ͷ�f��Ŀ��ָ��λ�ò���ɹ��ܽM�b���D2f����
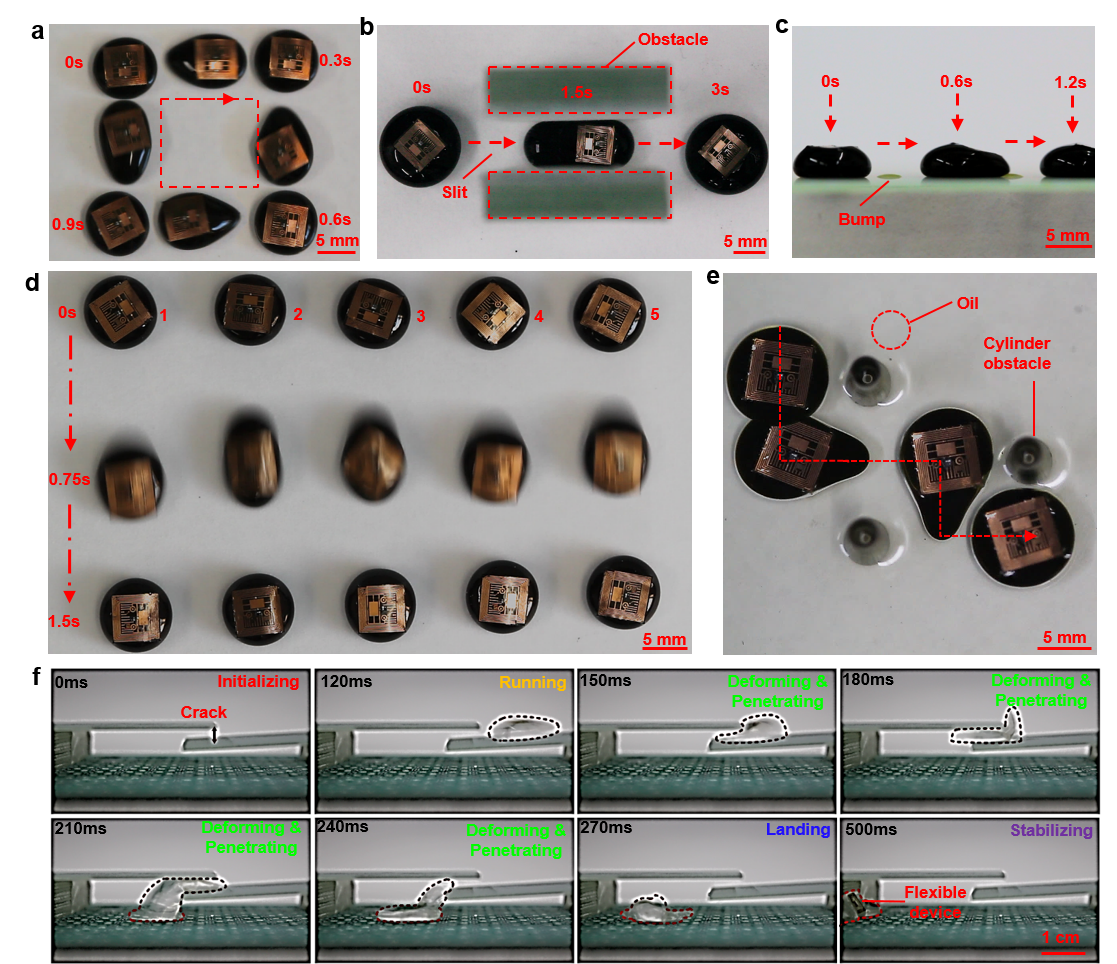
�D2����Һ�οɾ����\�Ӽ�׃�ΈD
���˾߂����õ��\�Ӻͭh���m������֮�⣬����Һ��߀���Ԍ��h���е����������W���������̖�M�Мy���Ͳɼ����F���������������ϼ����˶�N����������ضȂ���������Ȃ���������W�������������������������ǂ�������ʳƷ���������͟o�������ɼ�ģ�K�����F������Һ���o�B�̈́ӑB��B�µĂ��Мy������׃�ͭh�������ɼ����D3����

�D3 ����Һ���o�B/�ӑB���Мy���D
��Һ���c���������Y����һ�Nȫ�µĘ���ȫ����ܛ�w�C���˵ķ�����ԓ������ȫ�挍�F���s�h���¿ɪ���������ܛ�w�C���˵춨���A���ڇ��H����δ���c֮��Ƶ��о����w�F�������M�Ժ���ԡ�ͬ�r���@�N�����o�r�g�̈́ڄ��������о������˱�������ͨ���ɾ��̿��Ƶ����cʹ��ɑ����ڻ���y���W�ϳɡ�ˎ���f�ͺ��M�b����Ҫ���_�ٿغͳ��m�z�y�I����ʮ����Ҫ�ĿƌW���x�͑��Ãrֵ��
���P�����l������10��30�վ��ϰl���ڹ��̿ƌW�I��피��ć��H�ڿ�Advanced Science��Ӱ�����15.804������ʿ�о����������鱾�ĵĵ�һ���ߣ��S�@�����鱾�ĵ�ͨӍ���ߣ�����ҵ��캽��ʿ�鱾�ĵĹ�ͬͨӍ���ߡ����������õ��ˇ�����Ȼ�ƌW����No. 61604108���������Ȼ�ƌW����No.16JCYBJC40600��������W�������»����֧�֡�
Փ��朽ӣ�https://onlinelibrary.wiley.com/doi/10.1002/advs.201901862
- �����������܈F� Adv. Sci.���ܿ�܉���l�ĭh������� 2025-04-30
- ������܊��/�܊μ���ڈF� Adv. Sci.����ܭh����֬�о������Mչ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ��������ʎ���������ܛ�w�C���� 2024-10-26
- �A�ƴ�Ǻ��� Sci. Adv.�����؏�ʹ���������ϵ�y�����t�������O�y 2025-06-26
- ���_���������n�}�M����2026����W����Tʿ��ֱ������ - ���όW�����W���߷��ӡ�����W�������c�w�S��Ӌ��ģ�M�������Ϣ... 2025-06-13
- ���_��W���������n�}�M���ղ�ʿ����2025����W�������Y��ʿ��� - ���όW�����W���߷��ӡ�����������W�������c�w�S�����١�Ӌ��ģ�M�������Ϣ�� 2025-04-17
