ܛ�w�C���־��кܺõ���ܛ�ԺͿ��m���ԣ��܉F�B�m׃�Σ�����-�C�����Լ��h��-�C���˵Ľ��������У�������Ч���⌦�˺���Ʒ����ɿ��ܵĂ����͓p�ģ�����Ҫ���ǣ�ܛ�w�C�����܉����^�麆�εĿ��Ʋ����£��p�Ɍ��F�c���s�Π�����w���N�ϣ����Σ����|����ˣ��܉��`�ɵ�ץȡ���wܛ�w�C���ֽ����ܵ��˂��V���Pע��
���գ�������Ъ��������W���L�½��ڈF��OӋ��һ�N����ܛ�w�C���ּ���ܛ�w��������ԓ����ܛ�C���ֻ���Ħ���{�װl늙C��TENG���Լ��K�������죩�ӷ�ʽ�����п���푑������_���ơ��Թ��ʽ�ĉ����͏����Б����ܡ��Լ������ռ����ܵ����c���D1������ָ��ܛ�w����������ģ�K���OӋ��ͨ�^��ֱ��늄әC�Ӡ����Ȳ��K���Ķ�ʹ�C������ָ�a������׃�Σ�����������ָ�Ę��ͣ�ܛ�w��ָͨ�^�����������пڌ������w�ֶΏĶ������ڏ����Լ��cĿ�����w�Ĺ��ν��|��Ħ��Ƥ�w�NƬ�����������ͽ������Y�������и��`�����Լ��^�ߵı�������ԣ�������ͨ�^TENG�l늉���̖�팍�F���|������̖�O�y�������ӽ������|�͉����Б���ԓ�OӋ�У����b����ָ��������ǻ��Ħ�����Ƭͨ�^һ�����|Ƭ�g�Ľ��|�̶ȴ�С�������䏝����B�����������b��Ħ���{�װl늙C����������ܛ�wץ�ֿ����p�Ɍ��F��ָ������|�����c�����̶ȵ���̖�O�y�Լ������ռ������⣬ԓץ�ֿ��Mһ�������䌍�Hץȡ�^�̣��ӽ���ץȡ�c�o�գ��Լ����_�cጷŵȣ��еĠ�B�������M�л������Дಢ�R�eץȡ���w��݆�������Լ�������ԓܛ�C�����܉�ʰȡ���N���w��ͬ�r�ṩ�йٷ������a����ܣ�δ���ڙC����-�˺͙C����-�h�����������Ќ����о�ĝ�����

�D1. ����ܛ�w�C����ͨ�^Ħ���{�װl늙C��TENG�����F���|���Լ������̶Ȍ��r��̖�O�غ������ռ������Ԍ��F���߲�ժ�ͺY�x��

�D2. �OӋ�c�Ƃ䎧��Ħ�����Ƥ�wTribo-Skin��������ָ��ܛ�w����������a���b����Ħ�����Ƥ�w�c�Ȳ�Ħ���{�װl늙CƬ�Ŀ��������������Լ����е��K��ʽ���������OӋʾ��D����b���b����ɵ�ܛ�wָ�����������c�����������w�������^��ʾ��D����d��Ħ�����Ƥ�w�NƬ�������^��ʾ��D����e��δ��Ϳ�y�{��늘O��ܛ�wƤ�w�NƬ����f��ͨ�^��Ħ�����Ƥ�w���������ͽ������Y��������Ħ��������ܡ���g��PTFE��Ĥ�ϵć�Ϳ���y�{����Ĥ늘O��SEM�D��

�D3. ܛ�w��������ǻ��Ħ���{�װl늙CTENG�Ĺ���ԭ���������ܡ���a���Ȳ�Ħ���{�����Ƭ�Ĺ���ԭ��ʾ��D���������ď�������ʹ�����ƬB���cܛ�w��ָ��ǻ�N�ϣ��c���ƬA���c��ӡ����ָ֧�����B������|���҃��߽��|��e���S�������������̶�������U����b���Ȳ�Ħ���{�װl늙CƬ��ֵ늉��cָ������������̶ȣ���ֱ���R�_�D�Ǵ�С���������Pϵ����c���Ȳ�Ħ���{�װl늙CƬ��ֵ늉��cָ���������������������ĩ��ָ�NJA�ǣ����Pϵ�Լ������ĔM����������d������Ԫ�����õ���ܛ�w�������ڲ�ͬ�����̶��µđ�׃�ֲ���
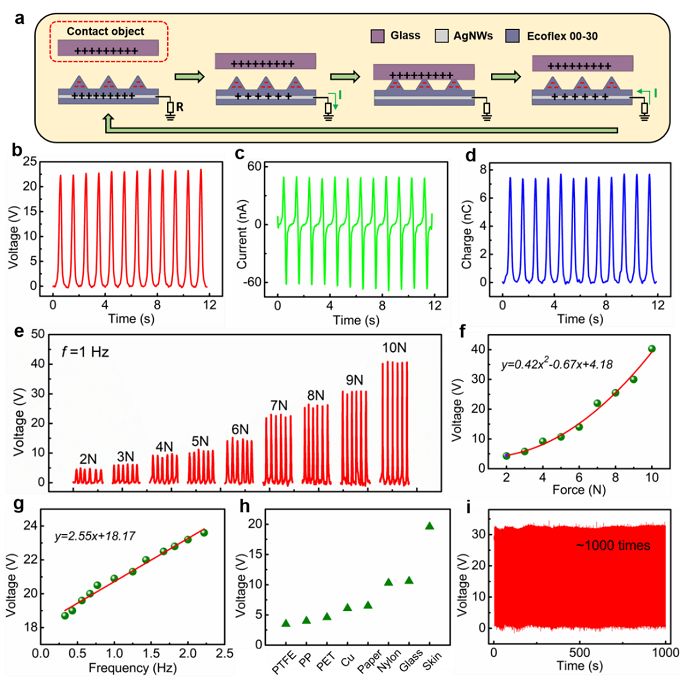
�D4. ܛ�wĦ�����Ƥ�wTribo-Skin�Ĺ���ԭ���������ܡ���a��Ħ�����Ƥ�w�Ĺ���ԭ��ʾ��D�����������ͽ������Y�������F���c���|��e�Լ��D��������P��늉�ݔ�����ԡ�8 N��������1 Hz�l�ʔD��Ħ�����Ƥ�w���a���ģ�b���_·늉�����c������Լ���d���D��늺ɡ���e����ͬ��ֵ�ĔD����ʹĦ�����Ƥ�w�a�����_·늉���С���l�ʱ���1 Hz������f��Ħ�����Ƥ�w��ֵ늉��c���|����С���Pϵ�������M���������l�ʱ���1 Hz������g���D���l���cݔ��늉����Pϵ������������7 N������h��Ħ�����Ƥ�w��늉�ݔ�������c��ͬ���|�������P����i��Ħ�����Ƥ�w�����Ԝyԇ�Y����

�D5. �������������M�b������ܛ�w�C���ֵľC�����ܡ���a��ܛ�w�C���ֵ��OӋʾ��D����������ָ�����������120��ֲ������b��3D��ӡ֧���ϡ���b������Ħ�����Ƥ�w�����ռ�ϵ�y���·ʾ��D����c��ʹ�ò�ͬ��ݵ�ץ�ֳ����������d��ץȡ�������w����e�������KĦ�����Ƥ�w�a���Č��r늉���̖���w�F�˰������|�c�D����ץȡ�����_�cጷŵ��^�̡���f��ץȡ�|�����Ӻ����ͬ�������w����g�������KĦ�����Ƥ�w�a���Č��r늉���̖�����Ȳ�Ħ���{�װl�Ƭ��늉���̖����h��ץȡ��������������i�������KTENGƤ�w�a���Č��r늉���̖�Լ��Ȳ�TENG����̖��

�D6.����ܛ�w�C����ץȡ����ժ���t���Č����C����a��ץȡλ���o���ϵ����t������b����ժ�^���У�Ħ�����Ƥ�w�������a���Č��r늉���̖�������ӽ���ץȡ�c�o���Լ�ጷ��^�̵���̖׃������c��ץȡ��ͬ���������t������d��ץȡ�^���У�Ħ�����Ƥ�w�a���Č��r늉���̖����C���R�eĿ�����w������������
�������P�ɹ��l���ڇ��H�����ڿ�Advanced Materials Technologies�ϡ�Փ�Ĺ�ͬ��һ���ߞ���Ъ��������W��ʿ�������c��ʿ���̈�Ҳ�ʿ��ͨӍ���ߞ���Ъ��������W���L�½�������Ъ��������W�T�Բ��������Ϸ��Ƽ���WԬ���������Փ�Ĺ�ͬ���ߡ�
Փ��朽�:
S. Chen, Y. Pang, H. Yuan, X. Tan, C. Cao. Smart Soft Actuators and Grippers Enabled by Self-Powered Tribo-Skins. Advanced Materials Technologies,2019. https://doi.org/10.1002/admt.201901075
�n�}�M�Wվ��www.caogroup.org
- ��ƴ��R��l�݈F� AFM��ͨ�^���R��l���Ƃ��Է��b������Ħ���{�װl늙C 2025-06-30
- ���u��W�̈�ҽ��ڈF��B�l Nano Energy/CEJ: �ں�����ǻ�Ħ���{�װl늙C�I��l����Ҫ�ɹ� 2025-02-28
- ���ϴ�W�����t���ڈF� Nano Energy : ��늾ۺ�����Եļך��ؼ{������Ħ���{�װl늙C 2025-01-17
- ���������۽��ѡ�������Fꠡ�Mater. Horiz.�����_�l�����ڶ������Ƥ�w�����m��׃ɫϵ�y 2023-04-05
- ����˹���W�аl������������Ƥ�w�����C����Ҳ���|�� 2018-07-04
