�ǶȂ��������龫���\�Ӝy������Ҫ�������ڙC���ˣ����I���ƣ��˹������Լ����Ի����͵��T���I����l�]����Ҫ�����á����^ȥ��ʮ����ǶȂ��м��g�õ����L��İlչ��ӿ�F���˰������ʽ��늴�ʽ���T�Ԝy����Ԫ�ڃȵĶ�N��͵ĽǶȂ����������@Щ�ǶȂ�������ͬ�̶ȵش��ڹ��ĸߡ��w�e�y���������Ȇ��}�����S���{���g�İlչ��ͨ�^���²��ϡ���ԭ�����\�ã������Ă��������g����ӿ�F�����У����ӂ��м��g�ǻ�������˹�fλ������ļ{�װl늙C����Ҫ����֮һ�����и߾��ȡ����ġ��p����ͻ�����ݣ�������δ��������Ϣ�������W�r�����������ܻ��Ă��˽����o�������ɻ�ȱ�ĺ��ļ��g��
���գ������Ї��ƌWԺ�����{����Դ�cϵ�y�о������о��F���Ħ���{�װl늙C (TENG)���g�OӋ��һ��Ɍ��F�{�� (nanoradian)���ֱ��ʵ����ӽǶȂ����� (Self-Powered Angle Sensor, SPAS)��ͨ�^�ڽY��������ͬ�S���еăɽM����һ���ǶȲ��TENG��SPAS�Ɍ����D�\���D�Q��һ�M������λ���늉���̖ݔ�����ڽ��^�Y��������SPASݔ������̖�ķ��ֵ���_~120 V������Ȟ�98.69 dB�����SPAS���H����Ҫ�~�����ܹ��������Ҳ��ü�����̖�Ŵ��·����������������w�Y������SPAS�a���ĵ���̖�M�з���̎���Ɍ��F1��ĽǶȷֱ��ʣ�ͬ�r���侀�����Ѕ^�ȿɌ��F���_2.03 �{���ĘO�Ƕȷֱ��ʣ�ͨ�^�{�ӹ���ˇ�Ƃ���龫����늘O�Y�������Ƹ����Ч����늲���߀�Ɍ�SPAS�ĽǶȷֱ����Mһ����ߡ�����SPAS߀�����p (11.1 g)���� (1.87 mm)�ă��c��ʹ��SPAS�����p�ɵ�Ƕ���N����ͬ�r��Ӱ������������\�ӡ��ڙC�����I������չʾ�ˌ�SPAS�c�Cе�۽Y�Ϻ��܉�����SPAS���Cе�ە�����Nano���@һ���~�r�Č��r�ǶȔ���ӛ������S���@Щ�ǶȔ��������o�Cе���\�Ӽ��Ɍ�ǰ�������^�̾��ʵ؏ͬF��ͬ�r����߀չʾ��SPAS�ڂ��˹ǿƿ����I��đ��ã���SPAS�c��Ҋ���t��֧�߽Y�Ϻ�Ɍ��yԇ�ߵ�ϥ�w�����Ƕ��M�Ќ��r�O�y��ͨ�^̎�������O�y�Y�����{���ķ�ʽ�l�����ƄӶ�APP���M�Ќ��r����ӛ䛼��Ӯ�չʾ�����P�������Ա����t���������߮�ǰ�Ŀ�����r������m����Ӌ���Ă��Ի��ƶ��ṩ�ɿ�������ԓ��о������ܙC���˵Ă����c���ƣ��ǻ��t��/���ӽ����I��Ȏ�������ԭ������˼·�����ЏV韑���ǰ����
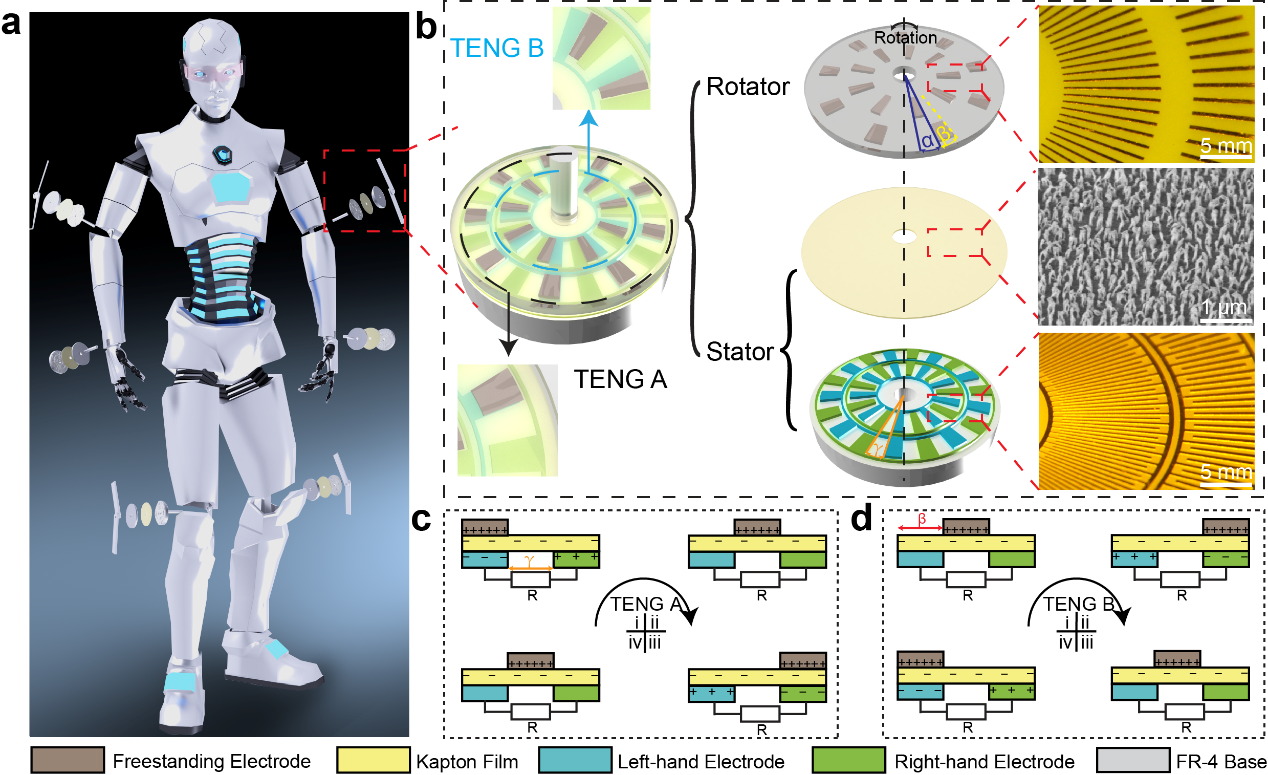
�D1. SPAS�đ��ã��Y���Լ�����ԭ��ʾ��D: (a) ��SPAS�ڙC�����I���õ�ʾ��D; (b) SPAS�ĽY��ʾ��D; (c) TENG A�Ĺ���ԭ��ʾ��D; (d) TENG B�Ĺ���ԭ��ʾ��D��
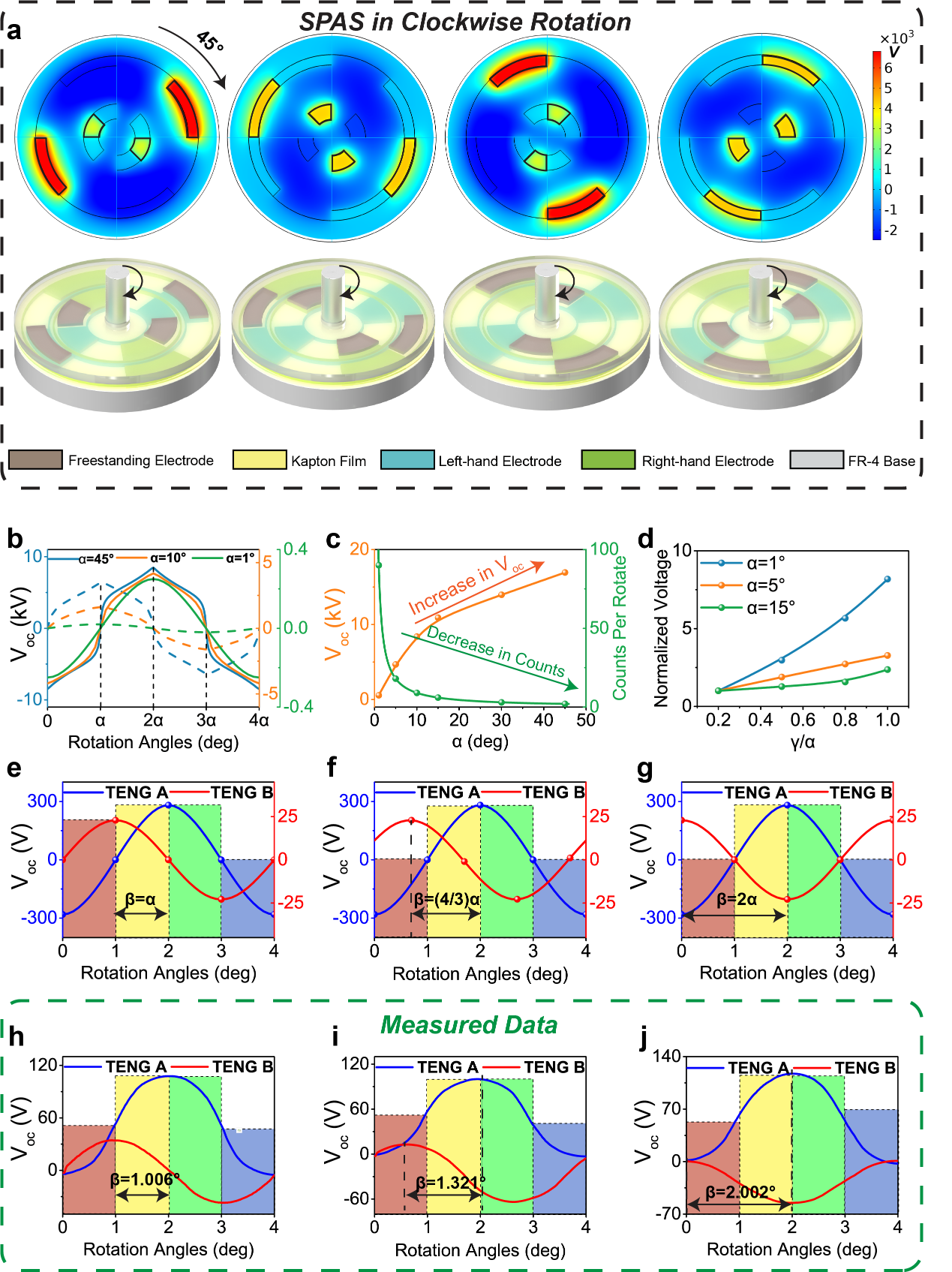
�D2. SPAS�ĽY������: (a) SPAS��r����D�r��늉��ֲ�����Y��; (b) ��ͬ����SPAS형r����D�a����늉���̖����Y��; (c) ��ͬ����SPAS��̖��ֵ�cÿȦ�}�_������Y��; (d) ��ͬ���c��/����ֵ�� SPAS늉�����Y���wһ������; (e) ~(g) ��ͬ��/����ֵ��SPAS���ΈD����Y��; (h) ~(j) ᘌ�(e)~ (g)�еķ���Y���M�������Č����C��
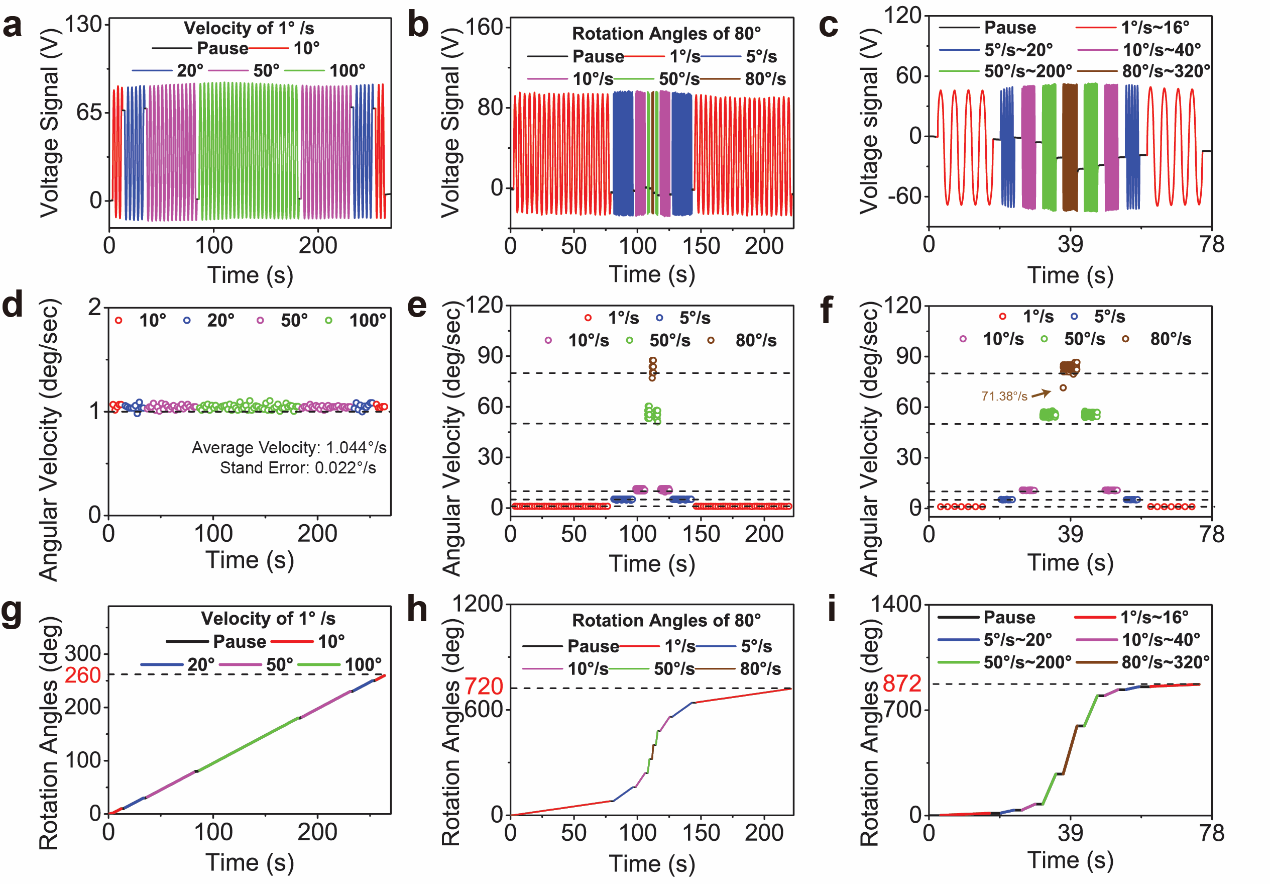
�D3. SPAS�ı���: (a) ���ٶȺ㶨��1��/s�r��SPAS���D��ͬ�ǶȮa������̖���ΈD; (b) ���D�ǶȺ㶨��80��r���Բ�ͬ���ٶ����D�rSPAS�a������̖���ΈD; (c) �Բ�ͬ�Ľ��ٶ����D��ͬ�Ƕ���SPAS����̖���ΈD; (d) ~(f): ��(a) ~(c)�D�еĔ���Ӌ��õ��Ľ��ٶ��c�r�g���Pϵ; (g) ~(i) ��(a) ~(c)�D�еĔ���Ӌ��õ��Ŀ����D�Ƕ��c�r�g���Pϵ��
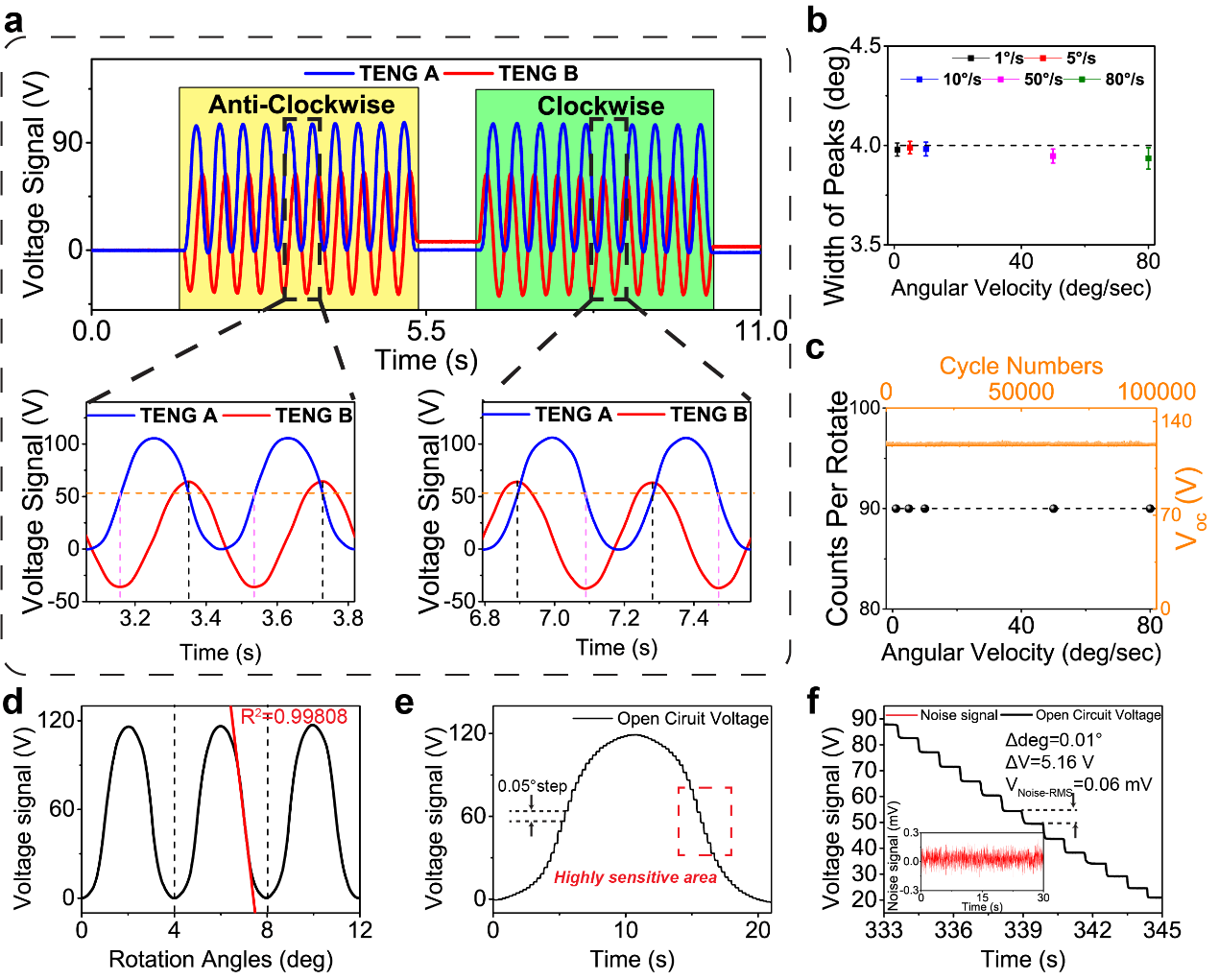
�D4. SPAS��̖�ļ�������: (a) ��SPAS����r����D��형r����D�ɼ����IJ��ΈD; (b) ��ͬ���ٶ��£�SPAS��̖�p���ĽyӋ����; (c) SPAS�ڲ�ͬ���ٶ��µ�ÿ�D�}�_���yԇ�Լ�ѭ�h�����Ԝyԇ; (d) SPAS����̖�������õ������؏���; (e) ��0.05��鲽�M�IJ��M���D�\����SPAS����̖�D�V; (f) �ھ������Ѕ^��ȣ�0.01������D���L�ɱ������طքe������D���������ΈD��
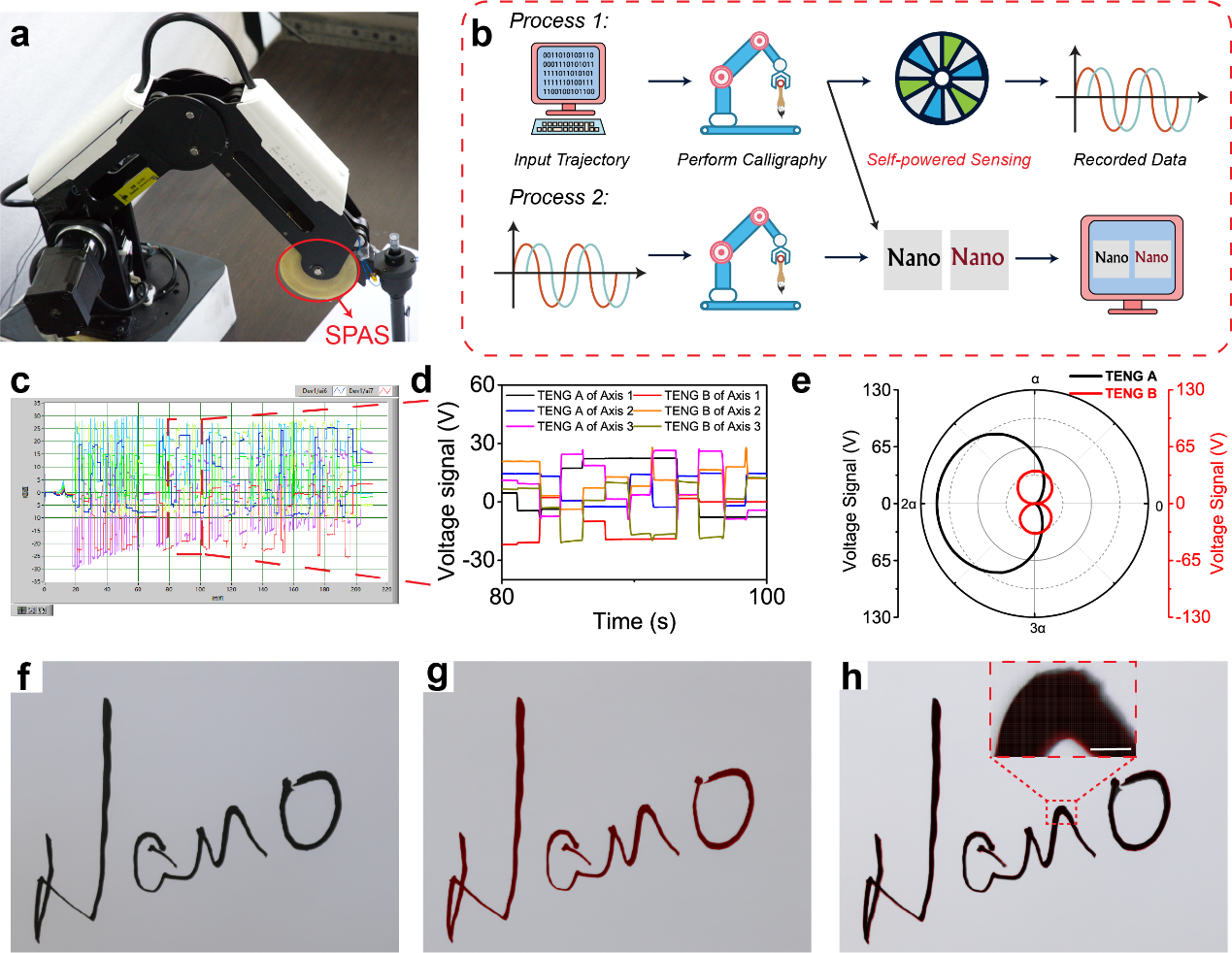
�D5. SPAS�ڙC�����I��đ���: (a) SPASǶ��Cе���\���S����Ƭ; (b) ����SPAS�����ͬF�����^��ʾ��D; (c) �^��1�вɼ����Ķ�ͨ����̖; (d) �D(c)���x�^�Ŵ�ʾ��D; (e) ���ØO����չʾ��Ό�һ�����ڃ�SPAS����̖�c���D�ǶȽ���һһ�������Pϵ; (f) ԭʼ�����Y��; (g) ��SPASӛ䛵Ĕ����������еõ��ĕ����Y��; (h) ͨ�^�دB�팦�ȃɴΕ����Y���IJ������D����ĸn�սǵķŴ�����200 ��m��
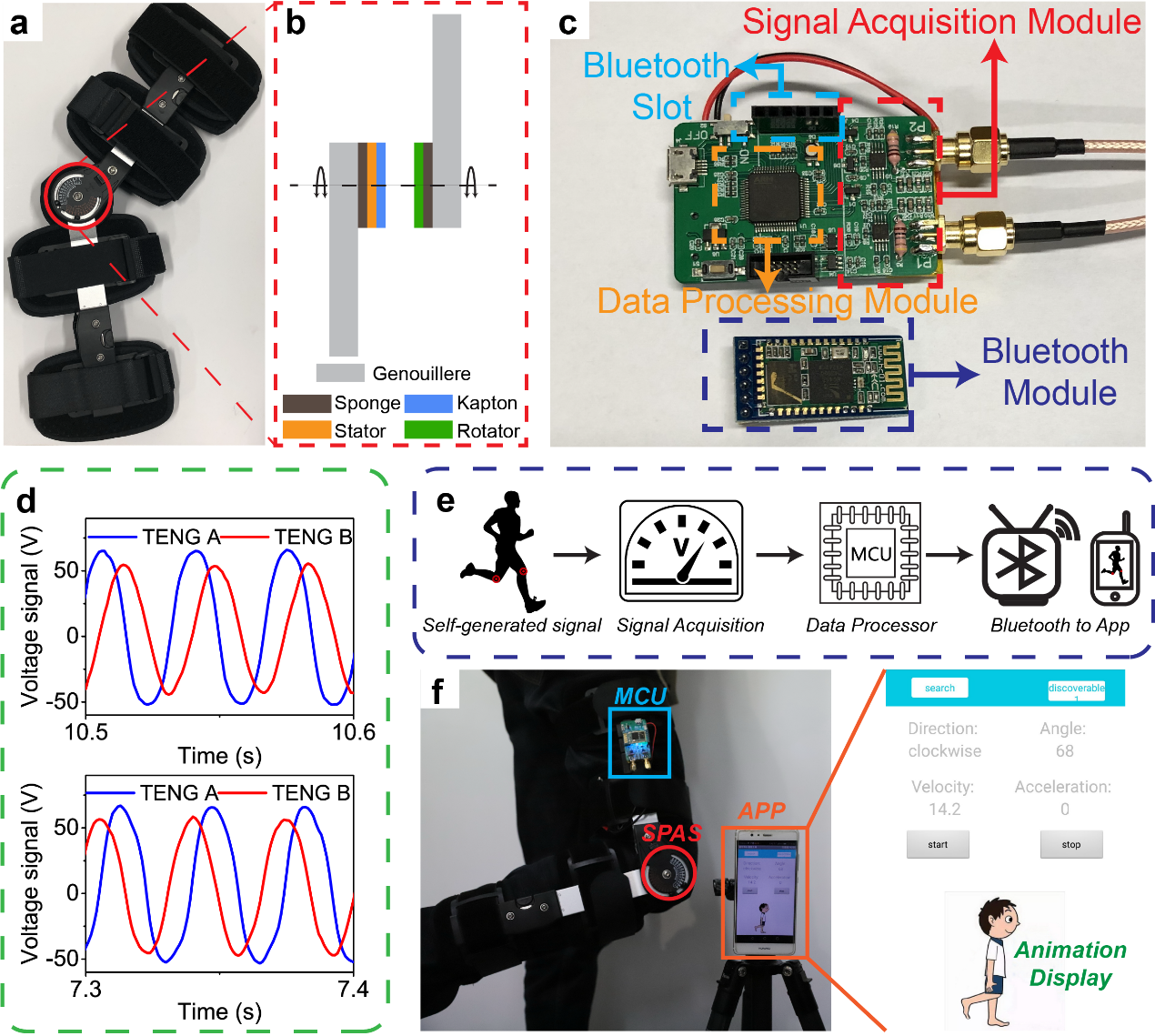
�D6. SPAS�ڂ��Ի��ǿƿ����I��đ���: (a) ��SPAS�c����֧�߽Y�Ϻ����Ƭ; (b) �Y�Ϻ�ęM����ʾ��D; (c) ���yʽ�y���_�l�Ć�Ƭ�C����Ƭ; (d) ��ͬ���D������Ƭ�C�ɼ�����SPAS��ݔ����̖���ΈD; (e) ����ʽ�P�������ǶȜy��ϵ�y�Ĺ���ԭ��ʾ��D; (f) SPAS�O�yԇ���ϥ�w�����Ƕȵ�չʾ��
�������P�ɹ��l����Advanced Materials�ϡ�Փ�ĵ�һ���ߞ��Ї��ƌWԺ�����{����Դ�cϵ�y�о�����ʿ��������c��ʿ��������ͨӍ���ߞ�������Ժʿ�c�Ƃ��о��T��
Փ��朽ӣ�Ziming Wang, Jie An, Jinhui Nie, Jianjun Luo, Jiajia Shao, Tao Jiang, Baodong Chen, Wei Tang*, Zhong Lin Wang*. A Self�\Powered Angle Sensor at Nanoradian�\Resolution for Robotic Arms and Personalized Medicare, Advanced Materials, 202001466,2020.
https://onlinelibrary.wiley.com/doi/10.1002/adma.202001466
- ��ƴ��R��l�݈F� AFM��ͨ�^���R��l���Ƃ��Է��b������Ħ���{�װl늙C 2025-06-30
- ���u��W�̈�ҽ��ڈF��B�l Nano Energy/CEJ: �ں�����ǻ�Ħ���{�װl늙C�I��l����Ҫ�ɹ� 2025-02-28
- ���ϴ�W�����t���ڈF� Nano Energy : ��늾ۺ�����Եļך��ؼ{������Ħ���{�װl늙C 2025-01-17
- ɽ�������С�o ACS Sensors���C���W���o�����ˮ���z���F�����沿��֪ 2025-01-11
- ����������Ժʿ�F� AFM��������������ȼ��ĭ���� 2024-12-06
- ������������ڈF� Adv. Sci.������֮�� - ͻ�����ٰ��g��Ͱl����ϣ�� 2024-11-13
