�^�e�ڂ��y�ľ��ЙCе�Y���Ą��ԙC���ˣ�ܛ�w�C���������`�ɵĽY��׃���ă��ݱ��ɹ��ؑ���������؛��ץȡ����������W������ӡ����w��ˎ�ᆱ���f�͵��I�C���˵�����܌��F����ȡ�Q�����`�ɵĽY��׃�������ڴſ�ܛ�w�C���ˣ���׃����Ҫ����Ż���ʽ�Q������ˌ��F�ɾ��̴Ż��܉���ߙC���˵�׃�ζ����ԡ�Ŀǰ����Ĵſ�ܛ�w�C�������ڴŻ���ʽ�ļs������׃�ζ��鏝��׃�Σ������ж�������׃�νY���Ĵſ�ܛ�w�C�����r�Ј�����@Ҳ��Ŀǰ�о���һ���y�c��ͬ�r�����F�C���˵Ķ���ԣ�����h����֪����λ���܉��Mһ������������Ч���Լ��Uչ�䑪���I����N���ϵğo�p���Ͽ��Ԍ��F�@һĿ�ģ��@Ҳ��ĿǰС�߶�ܛ�w�C�����о��ğ��c��
�b�����ϴſ�ܛ�w�C���˴��ڵĆ��}��������Ĵ�W�Cе�c�Ԅӻ����̌Wϵ�������ڈF����c��۳��д�W�����t�W���̌Wϵ���׳����ڈF������ͻ�÷¡��W�Cе����ϵCarmel Majidi���ڈF��������ɹ��_�l��ģ�K�M�b�IJ��ԣ����ڿɾ��̴ſض��ܛ�w�C���˵��о����䑪�á�ԓ���ԿɌ��F�C���˶��ӵĽY��׃����Ҳ�Ɍ��F���в�ͬ�������|�Ķ��ģ�K�ĽM�b��ּ�����С�߶�ܛ�w�C���˵Ķ���Ժ͑���ǰ�����о��ɹ�����Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules�����}�����ڇ��H�W�g�ڿ���Science Advances����Փ�ĵ�һ���ߞ�������Ĵ�W��ʿ����ʿ��
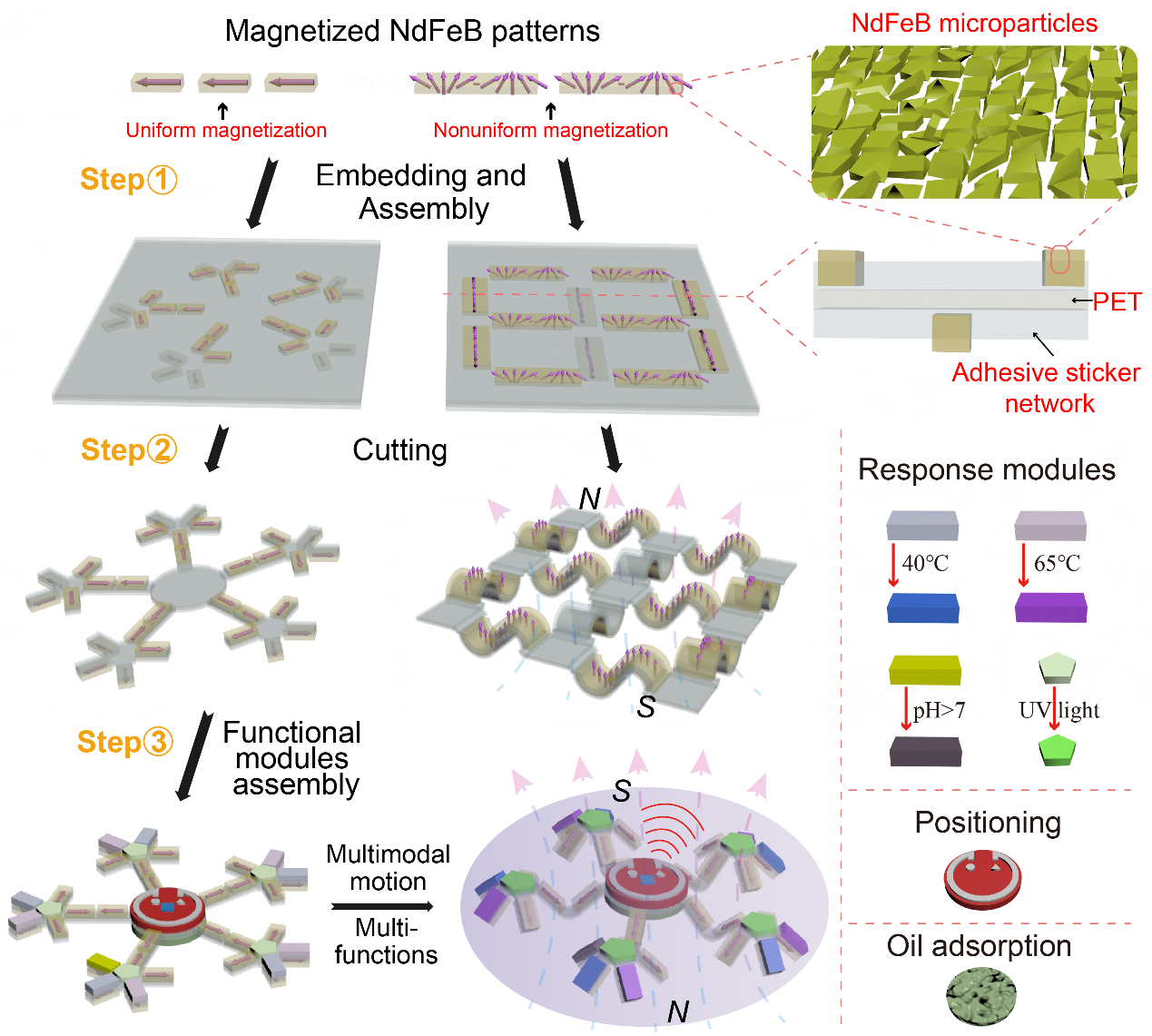
��D1��ʾ��ԓ�о������p���z���ϲ����z������ճ�����ܣ����Ȍ��F���S�F���w���M�ɵĴŻ�ģ�K���B�m�Ż��ͷ��B�m�Ż�����ܛ�w�C����ƽ��Y�����ض���λ�ĽM�b��֮��ͨ�^�Cе�и�ȥ��������p���z���͵õ���ܛ�w�C���ˡ��ڴň��̼��£�ܛ�w�C���˱��F�����`�ɵĽY��׃������ܛ�w�C������δ���Ż�ģ�Kռ�е�λ�ã���Ȼ���в����z��ճ�ԣ��@����������ģ�K���ضȸБ�ģ�K������Б�ģ�K��pH푑�ģ�K������ģ�K����λģ�K�͌��ģ�K���Ϳ����ڲ����z���������F�o�p���ϡ��M�b�Ķ��ܛ�w�C�����ڭh����֪�c�O�y���·�ޏͺ�θ�����ί����I����Н��ڵđ���ǰ����



������������������n�}�M�ڴ���С�͙C�����I��l���˳��^һ��ƪ�W�gՓ�ģ����F�ˏĺ��ס����{�יC���˼��伯Ⱥ�О���о��c���á����ֳɹ����£�Nature Machine Intelligence, 2022, 4(5): 480-493.��Matter, 2022, 5(1): 77-109.; Adv. Mater., 2022: 2201888.; Adv. Mater. 2022, 2109126; Adv. Funct. Mater., 2022: 2112508.; Sci. Robot., 2021, 6(52): eabd2813.; Sci. Adv., 2021, 7(9): eabe5914.; Adv. Mater., 2021, 33(37): 2100070.; ACS Nano, 2021, 15(3): 5056-5067.; Nat Commun 10, 5631 (2019); Sci. Adv., 2019, 5(1): eaau9650.; Nat Commun 9, 3260 (2018).
- �����������܈F� Adv. Sci.���ܿ�܉���l�ĭh������� 2025-04-30
- ������܊��/�܊μ���ڈF� Adv. Sci.����ܭh����֬�о������Mչ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ��������ʎ���������ܛ�w�C���� 2024-10-26
- ���д��������n�}�M�ϸ������д��t�WԺ��Sci. Adv.���������״ſ����ܼ��g��������Ѫ�܃Ƚ�����_�Ժ��ί�Ч�� 2025-06-23
- ��h�������tɏ��Ϳ��/�Aɽ�tԺ����� AFM���g���ޏ��ߵĸ��� - һ�N�˹��g���Ƃ���·��� 2024-10-14
- �A�ƴ��������ڡ���ȫ�����ڈF� Nat. Commun.���ʹſ��z�ҙC���ˌ��F��ģ�B푑��c��ܼ��� 2024-03-12
- ���m̹���״�W����ˬ��ʿ Adv. Mater.: ̽�����w�О� - �����ܲ��ϵ������OӋ 2025-05-04
