����������ָ���ض������������ԇ��ע���w��������ܓp�M�����{�����﹦�ܺ͵�����������һ�N�O��ǰ���������ί����ԣ��ڽ���������ˏV���Pע�����˳�ְl�]����������Ч���������f�Ͳ������P��Ҫ�����y��ȫ���Խo�������Կ�һ����ע�������������������Բ�f��;�н^�ּ������zʧ���o�����_Ŀ�˲�����¼�������Ч�ʺܵͣ�����߀������Ó�м��������l���غ��z�Y����ˣ��_�l��ȫ����Ч�ļ��������f�Ͳ��Ԍ������������_�l���x�ش�
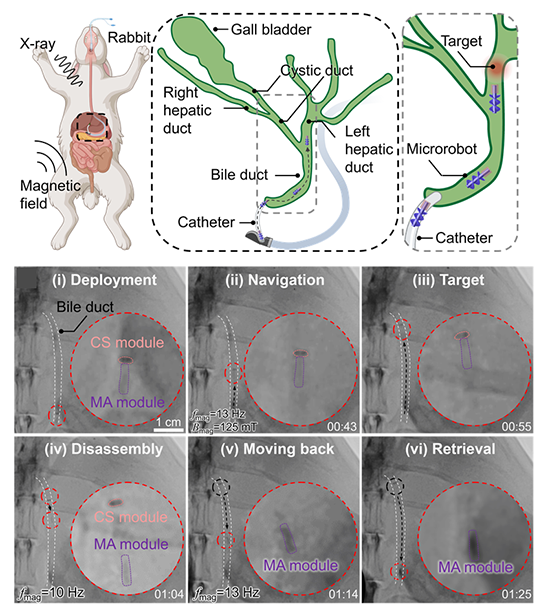
�͙C���˼��g���d�������f���ṩ���µĿ��ܡ����ڳߴ�С���\�����ӡ��`��ȸߵ����ԣ��͙C�����܉��ڳ�Ҏ�t���ֶ��y�Ե��_�ĪMС�]���^���\�ӣ���������һ�N�����d�ߣ����Ӹ�Ч�،������f����Ŀ�˲�������_�l�ı���N��͙C�����У��ſ��͙C���������Ӵň����{�ơ�������M�����ԏ��ҟoΣ�����ڼ����f���I��õ��ˏV���о��������������{����ͻ��W�ϳɵķ����Ƃ�ؓ�d������֧�ܽY������ͨ�^������僴��Ա�Ĥ��Ȳ����s�����w�����Ķ�������푑��ⲿ�ň����Ƶ�����ʽ�����f���͙C���ˡ����ǣ��͙C���˵ļ������ܺʹſع��ܴ���һ�����ݺ�ҕ��ì�ܡ������m�������w�ȏ��s�ӑB������h�����͙C���˵��\�ӺͿ�������Ҫ����@����Ҫ���͙C���������Ӵ����Ĵ��Բ��ρ팍�F���^�ȵĴ��ԓ��sһ��������@Ӱ��会�����ԣ��������¼����o��𤸽����һ������t������w�Ȝ����^�����Բ��ϣ����l���ڵ����ﶾ�ԡ������͙C����ֻ���������������|���M�����f�ͼ����ļ��������Ժ����ﰲȫ�ԣ����������w�ȵĿɿ،����t�ɞ���һ�����y�}����ˣ�Ŀǰؽ���_�l��߃����ſ��������������t�W���ܵļ����f���͙C���ˡ�
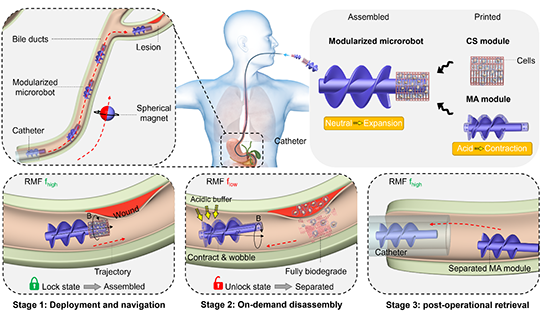
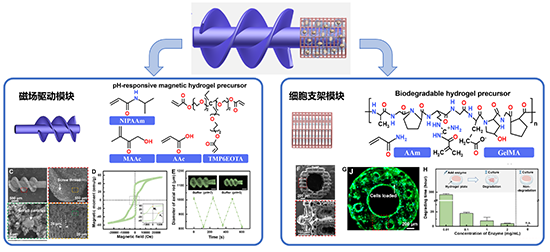

�D3. ģ�K���͙C���˵ĿɿؽM�b�c��ж

ԭ��朽ӣ�https://www.science.org/doi/10.1126/sciadv.adj0883
- �����t�WԺY. Shrike Zhang���ڈF� PNAS���]�hģ�K�����_����������оƬϵ�y 2024-11-15
- ������W�n���Ͻ��ڈF� Sci. Adv.�����S����ģ�K�������Ƥ�w 2024-08-23
- ���A��W�S�Aƽ�n�}�M Matter�������ڶ�N���ĵ�ģ�K���Π�̷��� 2024-01-19
- ���������ƾ��_�n�}�M��ACS AMI��: �����B�����͙C���� 2024-01-25
- ����������������������Small������׃���x���l�Ķ�Һ�͙C���� 2023-07-03
- ˹̹���w�ǿɽ��ڡ�Nat. Commun.�������w�ȵ��w�ٸ��� - �o���ɗ���ˎ�C���� 2022-06-17
