��Ȼ�������wϵͨ�^�B�m(x��)���Q���Ɖ��Լ������{(di��o)��(ji��)�C�ƣ����F(xi��n)��(f��)�s���ɿص��\�әC�ܡ��O(sh��)Ӌ�Ƃ���������(q��)�ӡ��Ԅӿ��ƹ��ܣ����܉��l(f��)���m(x��)�\�ӵ�ܛ�w�C��������ԓ�I(l��ng)�������(zh��n)���y�}�����y�c�����y�ԏ�(f��)�������w�е�����푑�(y��ng)����(j��ng)���ơ������{(di��o)��(ji��)��������Ŀǰ�������(sh��)ܛ�w�C����ͨ�^�ӑB(t��i)���̼��ٿ،��Q���Ɖ��c�؏�(f��)�����F(xi��n)������m(x��)�\�ӡ�һЩܛ�w�C�����������ړ�Ч��(y��ng)����ʎ���W(xu��)����(y��ng)�γɷ�����·�����F(xi��n)�(q��)�ӡ��\�ӵ��Ԅӿ��ƣ����ǣ��@Щ�\��ͨ������ʎģʽ���O(sh��)Ӌ����ƽ��(w��n)���l(f��)�����m(x��)�\��������ܛ�w�C���˾�����Ҫ�ĿƌW(xu��)���x�������ڎνY(ji��)��(g��u)����Ҫ�ԣ�ܛ�w�C������?f��)�Y(ji��)��(g��u)���(q��)�ӿ����Լ��l(f��)�\���е����������漰��
���գ��㽭��W(xu��)�������ڡ������������c�Ϸ��Ƽ���W(xu��)�邥������푑�(y��ng)��ˮ���z�Ƃ���в�ͬ��?f��)�Y(ji��)��(g��u)��ܛ�w�C���ˣ����F(xi��n)���o�B(t��i)���l���µ��l(f��)���m(x��)�\�ӡ��о�������?f��)�Y(ji��)��(g��u)�����˾ֲ�׃�ε��P(gu��n)(li��n)�ԣ��p�@�P(gu��n)(li��n)�����ړ�Ч��(y��ng)�Լ����D(zhu��n)�\�ӵ��������Թ�ͬ�x����?f��)�C���������{(di��o)��(ji��)���ܣ��Ķ����F(xi��n)�o�B(t��i)�̼��µ��l(f��)���m(x��)�\�ӡ�

�������ø�����ˮ���z�Ƃ��˲�ͬ�K�Y(ji��)�Y(ji��)��(g��u)����?f��)�C���ˣ������A�h(hu��n)�����~�Y(ji��)�����~��(ji��)�����_�T�Y(ji��)��Solomon link�������l(w��i)֮�ǽY(ji��)��Star-of-David link�������o�B(t��i)�������F(xi��n)�˳��m(x��)�ĝL����rolling�������D(zhu��n)��rotation�����\�ӡ��о����K�Y(ji��)�ߴ硢�����Լ����Տ��ȡ���������،���?f��)�C�����\�әC�ܵ�Ӱ�Ҏ(gu��)�ɡ�ͨ�^��Փģ���Mһ���C����ԓ�����{(di��o)��(ji��)���\�әC��Դ����?f��)�Y(ji��)��(g��u)�T��(d��o)���A(y��)��(y��ng)׃�����ٿ�����Π�׃���Լ����ڱ�Ч��(y��ng)�ąf(xi��)ͬ���á������?f��)�C���˿����ڈ�(zh��)���ض��΄�(w��)�������D(zhu��n)�X݆����Ʒݔ�\�ȡ�

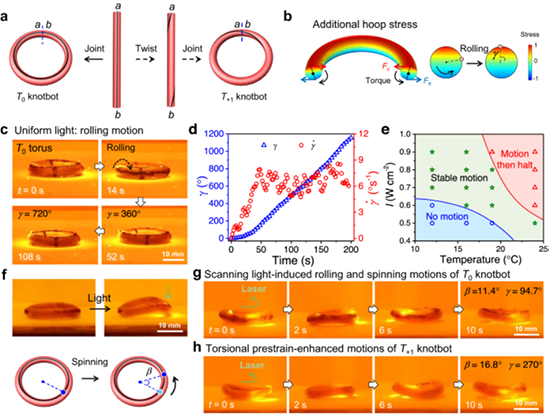
�D1.�A�h(hu��n)���z�C�������o�B(t��i)���ӑB(t��i)�����µ��B�m(x��)�\�ӡ�

�D2. ���~�Y(ji��)��?f��)�C�������o�B(t��i)�����µ��B�m(x��)�\�ӡ�

�D3.��N�K�Y(ji��)ܛ�C���˵��l(f��)���m(x��)�\�ӡ�
Փ����Ϣ��
Qing Li Zhu, Weixuan Liu, Olena Khoruzhenko, Josef Breu, Wei Hong, Qiang Zheng, Zi Liang Wu, Animating hydrogel knotbots with topology-invoked self-regulation, 2024, 14, 300.
https://www.nature.com/articles/s41467-023-44608-x
- ���Ͻ���κ�F� AHM������С����ˮ���z�Ĺ�푑�(y��ng)�Թ���ϵ�y(t��ng)���M����(j��ng)�p���ޏ�(f��)-M1/M2�;��ɼ�(x��)���cʩ�f��(x��)���Ľ������� 2025-06-10
- �|�A��W(xu��)ʷ��ꖽ��ڈFꠣ������w������푑�(y��ng)�Ԙ�����Ӽ{�����z�Ɍ��F(xi��n)���ԷΓp���������{(di��o)��(ji��)�Ϳ�����(li��n)���ί� 2025-05-15
- �Ĵ���W(xu��)������/�x溸��о��T�����B�����O���о��T AFM��һ�N����pH푑�(y��ng)�Ժ�ܛ�ǝB�����ij����Ӽ{���w���ί����P(gu��n)��(ji��)�� 2025-04-30
- �����ִ�Źٱ����ڡ������о��T�F� Nat. Commun.��̼���ۺ����c�T��(d��o)�Y(ji��)����ȡ���{(di��o)�ؘ�(g��u)�������͈��gˮ���z 2025-07-07
- ��ɽ��W(xu��)�Ƕ�ؔ/�S�ſ�/������/���x�F� Adv. Mater.�������L�v���ԵĿ�ע����̿�{��øˮ���z���F(xi��n)�[���ąf(xi��)ͬ�ί� 2025-07-04
- ���t(y��)��ë��Fꠡ��������R���N�F� Small �C������(f��)��ˮ���z�Ą�(chu��ng)���c��(y��ng)��-�ľۺ����wϵ���������x�Ӻ����Լ{�ײ��������ͽY(ji��)��(g��u) 2025-07-04
- ������������ֽ��ڡ����½��ڡ��w�θ����ڈF� NSR������ˎ��(x��)����Ⱦ���\�Ӳ�λ��(chu��ng)��ȫ�^�̹�����ȡ�����Mչ 2025-06-12
�\���P(gu��n)ע�߷��ӿƼ�

- ���ܹ��A��朆���������22��...
- �������C����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �������/˾һ�����۳Ǵ�...
- ����W(xu��)�����h(yu��n)���ڈF� AFM...
- ��ɽ��W(xu��)����n�}�M CEJ����...
- ���ݴ�W(xu��)�����ƽ��ڈFꠡ�Ac...
- ���W(xu��)����������T PRL����...
- �㽭��W(xu��)�Ǿ�܊���������F�...
- �����ִ�Źٱ����ڡ�������...
- �п�Ժ�{����Դ�����ܡ�����...
- �V�t(y��)��Ժ���١��V���T��ܰ N...
- �������i�w/���������...
- ����炐�ȁ���W(xu��)���h����...