���S��������f�����P��Ҫ���\�ӣ����������^����Ҫ�����Ŀ���ጷţ������S�\���cܛ�w�C���˽Y���Ǿ��������Եġ���ˣ����S�C�����ܵ��ˏV�����Pע�����͵����S�\����ه���ГQ�ⲿ�̼�������ň������@ʹ�������������ġ����ң����]��һ�N����ܛ�w�C�����܉�o�p�؏����S�D�Q��������ͬ���\��ģʽ�������L�Ӻ����S�����@�ɷN��͵��\���ڙC���ώ���ȫ��ͬ���������κ�ͨ�^Ŀǰ�F�ЙC���\�е��Գ��m�C���˶������܌��F��
�㽭��W�����F�����OӋһ�N�Ȍ��������������е�Һ�������w��LCE���W�j��ͨ�^�CеӖ���ķ�������������푑����Գ��mܛ�w�C���ˣ��D1�������������ֻ���ܲ������S��ܛ�w�C���ˣ�ͨ�^������ͻ���ęC�ƣ��@�NLCE�C�����܉��������ϵK�r�o�p�؏ĝL���\���^�ɵ����S��Ȼ����Խ�^�ϵK��ƽ���ػ֏͵��L�Ӡ�B��ͬ�r�������еĹ�푑���Ԫ�x����ܛ�w�C���ˌ��r�{�ص�������ʹ���܈��������Գ��mܛ�w�C�����y�Ԍ��F�ď��s�΄ա�ԓ�����ԡ�Multimodal Autonomous Locomotion of Liquid Crystal Elastomer Soft Robot�����}�l���ڡ�Advanced Science���ϡ����µ�һ�������㽭��W��ʿ����������㽭��W��ʿ��ꐹ���ʿ�鹲ͬ��һ���ߣ������о��T��ԓՓ��ͨӍ���ߣ��x�������ṩ�����P֧���cָ����ԓ�о��õ��˿Ƽ������c�аlӋ���͇�����Ȼ�ƌW����ί��֧�֡�
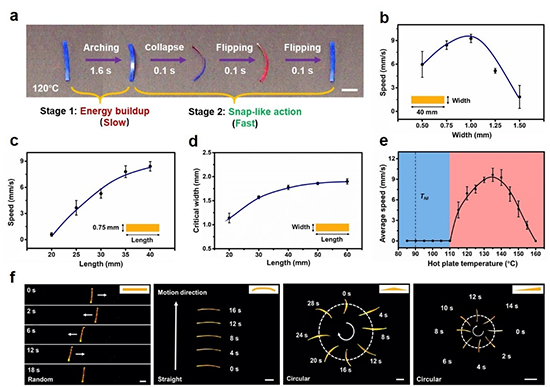
�D1 �Գ��m�\�ӡ�(a) LCE��һ���\�������еČ��r�D��(b) �\���ٶ��c��Ʒ���ȵ���ه�Pϵ��(c) �\���ٶ��c��Ʒ�L�ȵ���ه�Pϵ��(d) ��Ʒ�L�Ȍ��R�猒�ȵ�Ӱ푡�(e) ������ضȌ��\���ٶȵ�Ӱ푡�(f) ���в�ͬ���Π��LCE���\���О顣���б����ߞ�1������
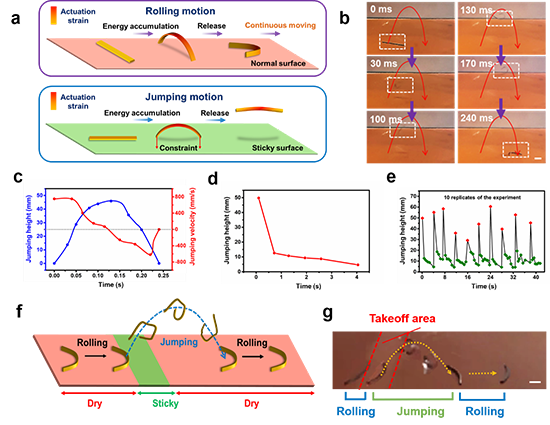
�D2 �������S�\�ӡ�(a) �L�Ӻ����S�C�Ƶ�ʾ��D��(b) LCE�ĕr�g���P���S�О����Ƭ��(c) LCE�����S�߶Ⱥ��ٶȡ�(d) �����ڃȵ��B�m���S��(e) ʮ���B�m���S���ڵď��ƣ��tɫ�c����ÿ�����ڵij�ʼ���S���Gɫ�c����ÿ�����ڃȵ��B�m���S����(f) ��ģʽ�����\�ӵ�ʾ��D��(g) �M�ϵ������L�Ӻ����S�\�ӡ����б����ߞ�1���ס�
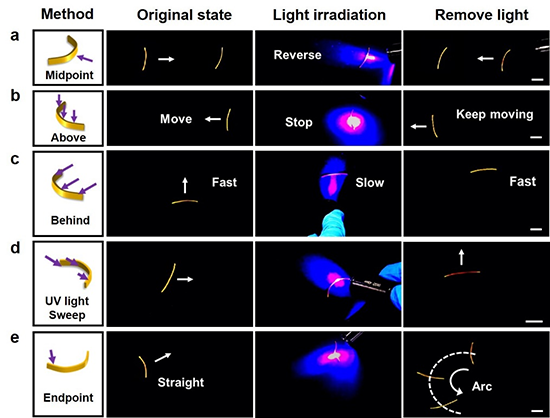
�D3 ��ض�ģ�B�����\�ӡ�(a) ͨ�^����LCE���c����׃�\�ӷ���(b) ͨ�^����LCE픲���ֹͣ�\�ӡ�(c) ͨ�^����LCE�����p�١�(d) ͨ�^�؏͏�һ�˵���һ�˒��^�Ĺ���D����(e) ͨ�^�����Ʒ���c5��犣���ֱ���\���D׃��A���\�ӡ����б����ߞ�1���ס�
ԭ��朽ӣ�http://doi.org/10.1002/advs.202402358
- ��ӿƴ����|���n�}�M Chem. Commun.���棺�o�w-���w˹̹��˹�Ӻ���ҶȈD��ļ��� 2023-10-15
- ��ӿƴ����|��/�������n�}�M��Adv. Sci.��������DASAs�Ĺ����ж��S߉�惦���� 2023-03-13
- ��ӿƴ����|���n�}�M JMCC ��Ո Perspective�����w�����в��ϵęC���c���� 2022-05-17
- ��۳��д�W��ƽ���n�}�M��Mater. Horiz.�����ɾ��̹��������R�_�ԽM�b�Y�����ڶ�ģ�B�\�� 2025-01-08
- �|�A��W������/���ڈF� ACS Nano����ʳ�ýY��ɫ���� 2025-06-27
- ���K��W���ս����n�}�M AFM�����w�w���ӳ�����Һ�������w 2025-06-24
- �eϦ���၆��W�����F� Adv. Mater.: �аl��ģʽ����׃ɫҺ�������w�� 2025-06-16
