���A������Ȼ�������Ч�����������������˹�����İlչ������Ҫ�Ć��l���á��ڱ����������ܲ����У�Һ�������w��LCE�������c��Ȼ�������ƵĿ��澀���ӑ�׃������������о���������LCE�Ƴ��w�S�r�����^��ıȱ���eʹ���܉F�c��Ȼ������Ƶij������ӡ�Ȼ�����θ��w�S�o���錍�H�����ṩ��������������w�S�ϲ�ʹ�Õr���ٶȕ����ȱ���e�ĜpС�����͡���ˣ��˹�����Ŀǰ߀δ���Ԍ��H���õijߴ猍�F�c���A���ஔ�Ŀ��پ����ӡ����������������ܲ��ϣ�����LCE�����˹�����ĭh���m�������ޣ���Ҫ���È����������ڿ՚�h���У��y����ˮ������ļ���һ��֧��ܛ�w�C���˵�ˮ���\�ӡ��������л��ڽ�늏����w���˹����⌍�F����ӣ����侀��׃�����ޣ������ܵ��Ɖĕr������ʧЧ�����������Բ��㡣
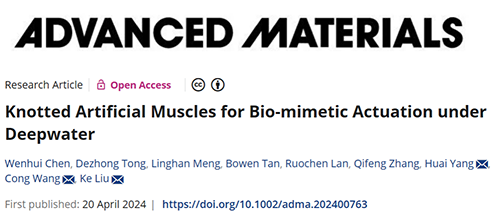

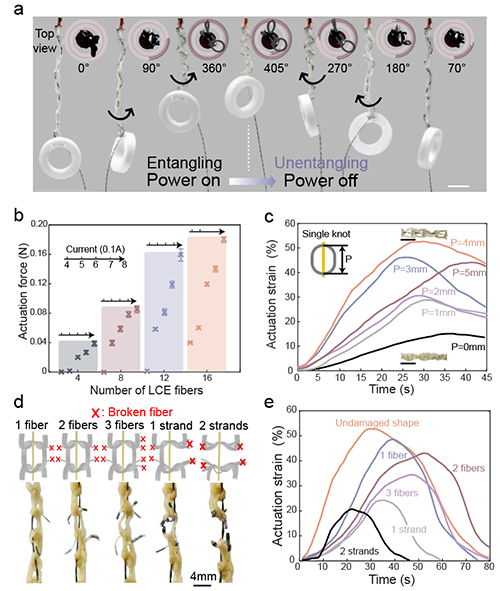

�D4. ƽ�Y�˹������ڜ\/��ˮ�h���еđ��á���a���˹������ӵĘ���ʾ��D����b���K�Y�˹������ӵĘ��ڜ\ˮ�µ��\����r����c���K�Y�˹������ӵĘ��ڜ\ˮ����1hz���l���ӵ��Ą���r����d���K�Y�˹������ӵĘ���3000mˮ�µ��\����r����e���K�Y�˹������ӵĘ���3000mˮ����1hz���l���ӵ��Ą���r����f�����K�Y�˹�������С�����^�̡�
�@헹������˹������ṩ��һ�N�µĽY���OӋԭ�t����Q���˹��������ٶȲ��㣬�m�����c���������Ć��}�����ң��@Щ�����K�Y�˹������������F����Ҏģ�����a�c���V���đ��È�����չ����̓�M�F���w�����g��ˮ�|�O�y���̽���ȑ����I���ṩ�˄��µĽ�Q���������P�о�����Advanced Materials���l���}����Knotted Artificial Muscles for Bio-mimetic Actuation under Deepwater�����о�Փ�ġ�������W��ʿ����������һ���ߣ�������W�����о��T���п�Ժ����Ԅӻ��������о��T�c������W������鹲ͬͨӍ���ߡ��������@���ˇ������c�аlӋ�������ܙC���ˡ���헵�֧�֡�
����朽ӣ�https://doi.org/10.1002/adma.202400763
- �Ĵ���W�~�ֽ��ڈF� Small�����з������О�����;ۼ�ȩ�w�S���˹�����Ę��� 2025-06-26
- ���_���������n�}�M����2026����W����Tʿ��ֱ������ - ���όW�����W���߷��ӡ�����W�������c�w�S��Ӌ��ģ�M�������Ϣ... 2025-06-13
- �V�|���I��W��W�����/��|�긱���� Small: ����ľ�|���^�Y���{�ؘ���ȫ�����|�����Ѽy���ޏ��˹����� 2025-04-18
- �|�A��W������/���ڈF� ACS Nano����ʳ�ýY��ɫ���� 2025-06-27
- ���K��W���ս����n�}�M AFM�����w�w���ӳ�����Һ�������w 2025-06-24
- �eϦ���၆��W�����F� Adv. Mater.: �аl��ģʽ����׃ɫҺ�������w�� 2025-06-16
- ���ϴ�W����/�S�M�F� AFM: �ڄӑB��ܗ�Y���{�ص��pɫ�Ҝ������ޏ͏����w���������W���ܷ��Α���ȡ�����Mչ 2025-06-25
