���wƤ�w�ȵĂ���ϵ�y�ܸ�֪���S���g�Ĵ̼����ܴˆ��l���о��_�l�܉��֪��������Ķ�S���Ԃ������������ܙC���˺��˙C�������I���зdz���Ҫ�đ���ǰ��������ˮ���z�đ�������׃���������������Ժá�ģ���c�M�����ơ������졢𤸽�Ժã������Ԃ����I��õ��ˏV�����о��͑��á���ˮ���z��ʧˮ�������r�Ȳ��Y�����Ɖģ�����������½��������t����Hysteresis�������}�������ڂ�����������������һ���棬��S������Ҫ�_���Ƹ����ԽY���͂������ܣ������в��ϵĿɼӹ��ԺͽY���{������˺ܸߵ�Ҫ����ˣ��о��Ƃ���t������ʧˮ��ˮ���z�������������췽�������������ԵĶ�S���������DZ��I��ؽ����Q���P�I�ƌW���}��

�D1 ���t���ЙCˮ���z�ĽY�������ܼ���������S��������

�D2 �ЙCˮ���z�����W���ܡ�ճ���ԡ��������Ժͱ�ˮ�ԡ�
�D3 �ЙCˮ���z�Ă�������

�D4 �ЙCˮ���z��3D��ӡ����

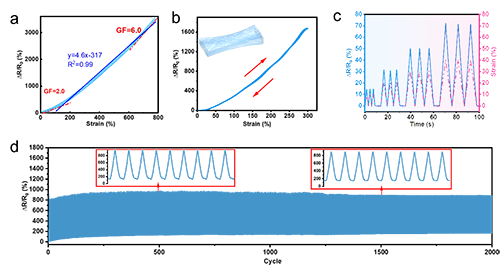
�D5 Ƥ�w���l�Ķ�S������

�D6 ��S��������
�@�N����Ķ�S�Y��ʹ�������܉�_����׃�ķ����������������һ�Y�����������o�����F�ġ�����X�S��Y�SZ�S�������͉����քeʩ�ӵ���S�������ϣ������ӂ��������a����ͬ����R/R0푑����D6a-f������������ɴ��������Ƥ�w����֪־Ը���ֲ������Ĵ�С�ͷ��D6g-i�������⣬��S�����������R�e���w�\�ӵ���ʼ����͡�����S���������b�ڼ粿�����ԱO�y־Ը���e��⏕r���\�Ӽ�����ͨ�^�{�����ɼ�������̖��ݔ���֙C�ϣ��D6j-l������־Ը�߁��ؓ]�ӆ�⏕r��Y�S��X�S�ӂ���������ݔ����̖��Y�S��̖���ȸ���X�S��̖���ȣ���ӳ��־Ը���ڲ�ͬ�����ϵ��\�ӷ��ȣ��D6k������־Ը�����w���e��⏺ͷņ�⏕r��X�S����̖���Ȅt�h����Y�S���D6l����
ԓ�о�����ͨ�^��ˮ���z�W�j�Y�����OӋ�@���˾��е��t�����ɴ�ӡ����ʧˮ����ƣ�ڵ������ЙCˮ���z����Q��ˮ���z�����W���d�����ɳڡ���ƣ�ڡ���ʧˮ�Ȇ��}��ͨ�^3D��ӡ�Ƃ��S�����������Ը�֪���̼��ķ����R�e���w�\�������֪3D�̼��_�����µ�;���������ڴ��M�����ɴ����\���R�e�����ܙC���˸�֪ϵ�y���I��đ�����
Փ��朽ӣ�https://doi.org/10.1016/j.cej.2024.156581
- ��ɽ��W�������ڈF� Adv. Mater.�����t�����ߵ͜ص��ЙCˮ���z�˹��|�X 2024-09-12
- �|�A��W������/�O��ͯ/���P�F� Adv. Mater.�����t�������g�����Ӿۺ����x�����z 2024-08-31
- �ϼ��ݴ�W�w�����Fꠡ�Sci. Adv.��: �������S�ۼ��Ŀ����쑪׃������ 2023-08-26
- ������Wκ���︱���ڡ����ν��ڈF� AFM������ɶ��ƻ�����ܛ�O��Ķ�ܡ��ɴ�ӡ�۰������� 2025-04-15
- ���������WԺ�߂������n�}�M Nat. Mater.: ȫ��ӡMIP�_���ɴ����cֲ��ʽ�p�ؑ�����ƪ�� 2025-02-05
- �Ĵ���W���½��ڡ��������о��T��Adv. Sci.�������ܾ۰��������ɴ�ӡ���ɻ��ա�������푑�����݂����� 2024-10-19
- ������������ڈFꠡ�Biosens. Bioelectron.�������Ӿ��w����đ�A��ø���z��������Ч�z�y�ЙC������ 2024-10-14
