�C���|�Xϵ�y�����ܙC���˵��I����ʮ����Ҫ�đ���ǰ�����������Ԃ�����е��˹��|�X�ǙC���|�X�I���ǰ�غ͟��c�о�������ˮ���z�đ�����׃������������ܛ�����졢���ζȸߡ��N���Ժõȃ��c���ɸ�֪�����ضȵȴ̼����ɞ��������Է����˹��|�X�о��ğ��c��Ȼ����ˮ���z�ܟ���ʧˮ���܃��Y�����ڸߵ͜صȐ��ӭh���¹����r����������ʧ�������͙ܺCе���ܣ����L�ڄӑB�d���£�ˮ���z�Ȳ��Y�����Ɖģ����Cе�����t��(Hysteresis)�F��ʹ�Â�����̖���t��ʧ�档��ˣ��о����_�l���t�����ߵ͜ص����z���ϣ�ʹ���ڸߵ͜حh���б��ַ����Ŀ������ԡ��g���Լ��������ԣ��Ƿ��������˹��C���|�X�о��Ͱlչؽ����Q���P�I�ƌW���}��
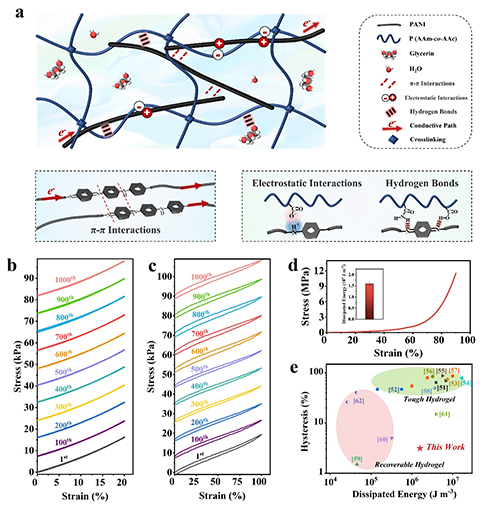
�D1 ���t�����g���ЙCˮ���z�ĽY�������W���ܡ�

�D2 �ЙCˮ���z�đ�׃�͑��������`���Ⱥͷ����ԡ�
ԓ���z���ø���-ˮ��Ԫ�܄��wϵ���@�������˱��c����������ʹ�ЙCˮ���z�ڵ͜��²��Y�����ߜ�����ʧˮ��DSC�о��Y�����������z��-100��C~0��C�������z���Y������60��C�����z�ı�ˮ���_60%���ϡ���ˣ���-18 ��C��60 ��C�h���£����z���փ��������g�ԣ��D3a,b���͑�����׃�������ܣ�ѭ�h����100�Σ����z���л�������̖���ַ������D3c,d����

�D3 �ЙCˮ���z�ڸߵ͜حh���б��փ��������Ժ͂��������ԡ�
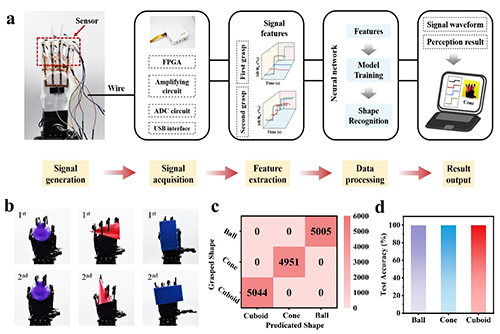
ԓ�F�̽�����ЙCˮ���z��׃�͑�����������ڙC�����\�Ӹ�֪���ք��R�e��ץ�ո�֪�ȷ���đ��á����ˌ��r�O�y�Cе�ֵ��\���^�̣�����ָ�����b��׃������У��D4a����ÿ����ָ���\�ӌ������z����������׃�Ρ�늌���/�����׃�����a����ָ�\�Ӡ�B��̖���D4b������̖���ȷ�ӳ����ָ�ď����̶ȣ�ͨ�^�傀ͨ���քe�ɼ������ָ���\�ӣ��C�Ϸ�����̖���������R�e�Cе�ֵ��\�Ӻ��քݣ��D4c����

�D4 �ЙCˮ���z��׃�͑�������������ڙCе���\�ӱO�y�����w��֪��
�D5 �C���W���o�����˹��|�X�������w�Π��R�e��
ԓ�о�����ͨ�^���εIJ��ϽY���OӋ�@���˸ߏ��g�����t�����ЙCˮ���z����Q��ˮ���z��ʧˮ���Y�����Y���ƉĶ�����ʧ���ܵ��y�}��ʹ�ЙCˮ���z�������܉��ڸߵ͜����L�ڷ���������������C�˻���ԓ���z�����˹��|�X�Ŀ����ԣ������Ƹ����ܡ��L�����˹��C���|�X���Ƅ�������һ�����ܙC�����I��đ����ṩ����Ҫ��˼·��
ȫ��朽ӣ�https://onlinelibrary.wiley.com/doi/10.1002/adma.202408193
- ��ɽ��W���������n�}�M Chem. Eng. J.��Ƥ�w���l�ĵ��t���ЙCˮ���z��S������ 2024-10-17
- �|�A��W������/�O��ͯ/���P�F� Adv. Mater.�����t�������g�����Ӿۺ����x�����z 2024-08-31
- �ϼ��ݴ�W�w�����Fꠡ�Sci. Adv.��: �������S�ۼ��Ŀ����쑪׃������ 2023-08-26
- ������������ڈFꠡ�Biosens. Bioelectron.�������Ӿ��w����đ�A��ø���z��������Ч�z�y�ЙC������ 2024-10-14
- ��ɽ��W�������ڈFꠡ�Adv. Funct. Mater.�����⡢��ʧˮ�ij����g�ЙCˮ���z��Ĥ��׃������ 2024-09-07
- �V����W�����/�A���X�½��� AFM������ľ�|�ػ����}����ЙCˮ���z����������ճ���͟o�\�ӂ�Ӱ��Ƥ늘O 2024-08-23
- ��������W��贽��� Adv. Sci.�����ښ����Ǒ������ľ����|�X��֪�������˹��|�X��Ԫ 2024-03-25
