��Ԯܛ�C������������ṩ��ɫ���`���ԡ��m���Ժ͙Cе�Թ��ԣ���̽���ͱO�y���s���ǽY�����h������đ���ǰ���V韣�������Խ��Խ����Pע���M��ܛ�C�������@һ�I��ȡ�����@���Mչ������һ푑���ܛ�C�����������C������ƽ�������֮�g�`����D�Q�c�^�ɡ���ˣ����ͨ�^�����fͬ����ܛ�C������ƽ̹/�����ϵ�����������չܛ��Ԯ�C���˵đ��þ����ش����x��

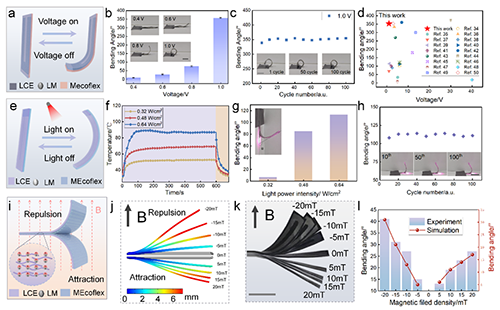
�D2. LCE/LM/Mecoflex�������/��/�������ܡ�
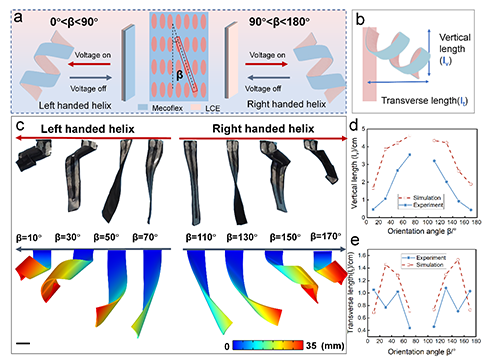
�D3. LCE/LM/Mecoflex�����������������ܡ�
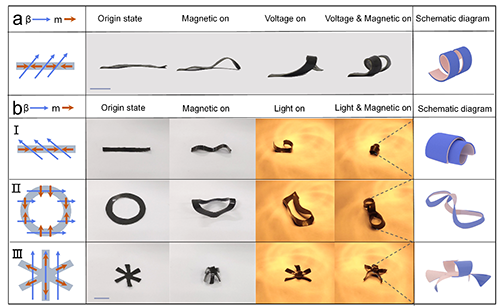
�D4. LCE/LM/Mecoflex��������������ܡ�
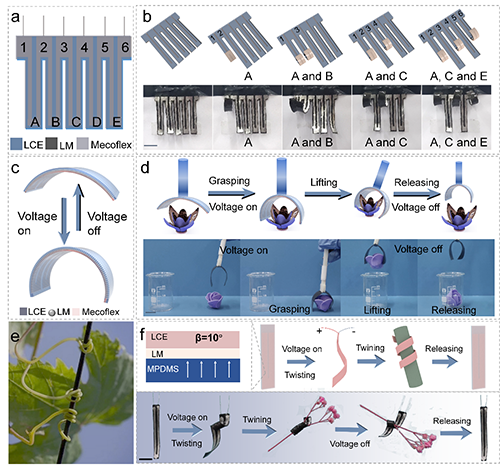
�D5. LCE/LM/Mecoflex�����đ���չʾ��
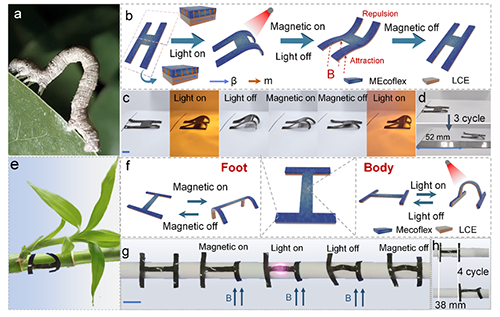
�D 6. ������Ԯ����C���˵đ���չʾ��
�C�����������������һ�N����Ԯֲ��l�Ķ�푑��Ϳɾ����ӵ�LCE/LM/Mecoflex ���������ڲ�ͬ����Û��Һ����׃�ąfͬ���ã�LCE/LM/Mecoflex ��׃�εõ����Mһ�����ӡ�ͨ�^�OӋ LCE ���еķ���ȡ��� Mecoflex ���д����w���Ż�����LCE/LM/Mecoflex ��������ʩ��늈����t�����ʹň��r���F�����桢���ҷ����ď��������������О顣�����@�N���õ��������ܣ������_�l���˶�N�ɾ���ܛ�����������������/�Ż�t���/�Ņfͬ�������ڶ��S�����S�Y��֮�g�M�п����ГQ�����һ������C������ƽ��������ϵ����Ќ��������C�������_�l�������`���ԣ����������әC���˵��OӋ�������ṩ��һЩ���l��
ԭ��朽ӣ�W. Li, C. Lou, S. Liu, Q. Ma, G. Liao, K. C.-F. Leung, X. Gong, H. Ma, S. Xuan, Climbing Plant-Inspired Multi-Responsive Biomimetic Actuator with Transitioning Complex Surfaces. Adv. Funct. Mater. 2024, 2414733. https://doi.org/10.1002/adfm.202414733.
- �Ĵ���W�ߕ��������n�}�M AFM�������p�ҽ錧�Ŀ��g�خ��Զ�푑��o�d�w�ԽM�b�{���fˎϵ�y�ϻ����������������h�� 2024-02-21
- �Ľ�ƽԺʿ�A�ƴ�F� Small���������x�ӽ��Q�Ĵ����R�_��Ⱥ���ڿɿ�ˎ���f���c���� 2023-12-10
- ��܊܊�t��W������/����������ԣ�� CEJ���ڶ�푑��Π�ӛ���Ӻ��Թ�늂��м��ɻ����Ϸ���ȡ�����Mչ 2023-11-06
- ̹���״�W����ˬ��ʿ Adv. Mater.: �o�����l�� - �u�IҺ�������w��������������� 2025-05-31
- �����������܈F� Adv. Sci.���ܿ�܉���l�ĭh������� 2025-04-30
- ����������W����� Nano Energy�����ڏ�����Y�������Թ�����w�����Ͻ�늏����w���� 2025-04-22
- ���ϴ�W������/����Ⱥ/���� Adv. Mater.����������ʿ�{�{��ܷ��������ݶȿ���Ϳ�� 2025-07-01
