MIT�аl��׃�C���ˣ����m����ͬ�΄�
2017-09-29 ��Դ��cnBeta
���ܶ��F�߀���OӋ�ض���;�ęC���˵ĕr����ʡ�������о��ˆT���ѽ���˼����δ���һ�����׃�Q���N���Ρ����m����ͬ�΄յ���ʽ�C���ˡ�ԓ�C�������С�Primer������ͨ�^���F���������ߡ��L�ӡ����еȄ�������һƪ�}�顶�����ۼ�������ęCе׃�Ρ�Փ���У��ƌW�҈F�Ԕ����B�����������ͨ�^��һ�K�A�Ƶ����ϰ��ϼӟ�������¡����Լ���ˮ����Ó�¡��ġ�
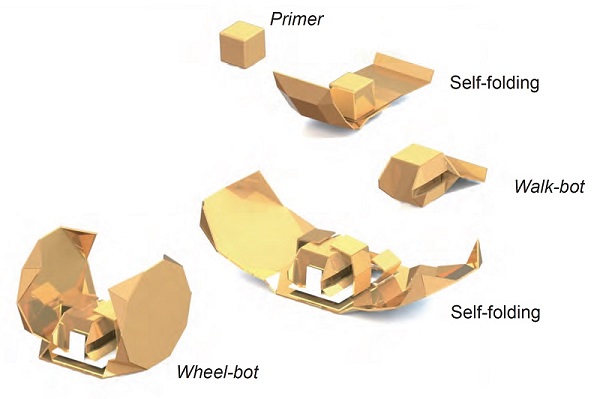
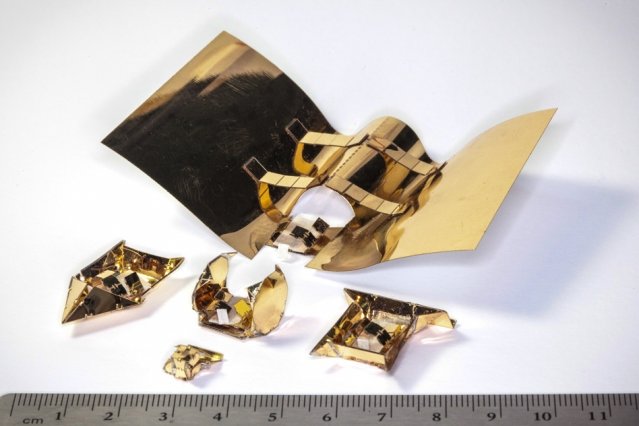
Primer һ�οɡ����ϡ���ֹһ�����ס��M�ܿ��������Ǻ��@㤣����@��о��������ɾ�����׃�����С�ɡ�

����һ�£�������@헼��g��չ��ȫ�ߴ磬δ���҂�����Ҋ�����S���������һƬ��������׃���һ�v���~�_�ġ�
Transforming Robots with Origami Exoskeletons
��ʡ�����WԺӋ��C�ƌW�c�˹����܌�������μ��Ŀ��ϯ�о��T Daniela Rus ��ʾ������������һ�죬�҂��܉���ʹ�ò�ͬ�������ӌ��ԵęC���ˣ����ڱ�Ҫ�r�����M�и��¡���
ԭ��朽ӣ�http://news.mit.edu/2017/superhero-robot-wears-different-outfits-different-tasks-0927
����c��؟�������W퓵ă������Ї��ۺ���W�ռ����W�ϰl������Ϣ�����@�á�Ŀ�����ڂ��f��Ϣ��������������ζ��ٝͬ���^�c���C�����挍�ԣ�Ҳ�������������h���H�ṩ����ƽ�_����������ؓ؟�����漰�֙࣬Ոϵ�҂����r�Ļ�h�����]�䣺info@polymer.cn��δ�����Wͬ�ⲻ��ȫ���D�d��ժ��������������ʽʹ��������Ʒ��
��؟�ξ���xu��
���P��
- ����炐�ȁ���W������ڈFꠡ�Nat. Commun.�������õ����|�ۯB�ͽ��ۯB�����Π�ӛ������׃�����|ˮ���z 2022-01-21
- ��ʡ�����WԺ�w�x�R���ڈFꠣ��¼��g����һ��ȴ�ӡ���Ż���� 2018-06-14
- ���������WԺ���K�����������WԺ�ß���׃���ϴ���o��늙C��늳صĄ�ˮ�C���� 2018-05-17
- ���ϴ�W���i/�ӱ������ϴ��۵ȡ�InfoMat��������ˮ���z�pģ�B�����������C�������ܲ���/ܛӲ���R�e 2025-06-13
- �����������܈F� Adv. Sci.���ܿ�܉���l�ĭh������� 2025-04-30
- ��h��W����������n�}�M Nat. Commun.������ͻ��ʧ�����ԵĚ��ˮ���z�˹����� 2025-04-10
