�ܵ��ɴ��������·�Ć��l��������������ճĤչʾ����ĝ�����Nature Reviews Materials,2022��7(11), 908-925����ͬ�r�������ṩ��һ�N�o�����w���f�ͷ�ʽ��Nature Reviews Materials, 2019, 4(2), 83-98����Ȼ�������ڝ��ӑB���Mխ�ď��s�w�ȭh�����ڪMխǻ����ԭλ���m���\���c�ί�ʮ�־�������

���ڣ�������Ĵ�W�Cе�c�Ԅӻ����̌Wϵ�������ڈF���������Ĵ�W�t�WԺ�w���ʽ��ڡ�������Ĵ�W��ع�Ƅ����t�W���g����ꐆ��������c�㽭��W�Cе���̌WԺ�˳̗��о��T��θ�ᷴ���鱳����չʾ�˟o�����ܵ��������֧������ʳ���S�T��늴̼��ί���ԓ���֧�ܿ�׃�εĽY���Y�ϱ���������IJ���ʹ�����֧�ܿ��Գ���150% �S�����L�Լ�50% ���s�����������Ã��Rͨ�^��ǻ��ɟo���f�͡�ͬ�r���n�}�M�ڳ����i����ģ������C�����֧�ܵ��w�ȹ����Լ��S�T�o��늴̼�����Ч�ԡ����P�о��ɹ��� ��Wirelessly powered deformable electronic stent for noninvasive electrical stimulation of lower esophageal sphincter�� ���}�l���ڇ��H�����ڿ���Science Advances�������x��W퓷��档

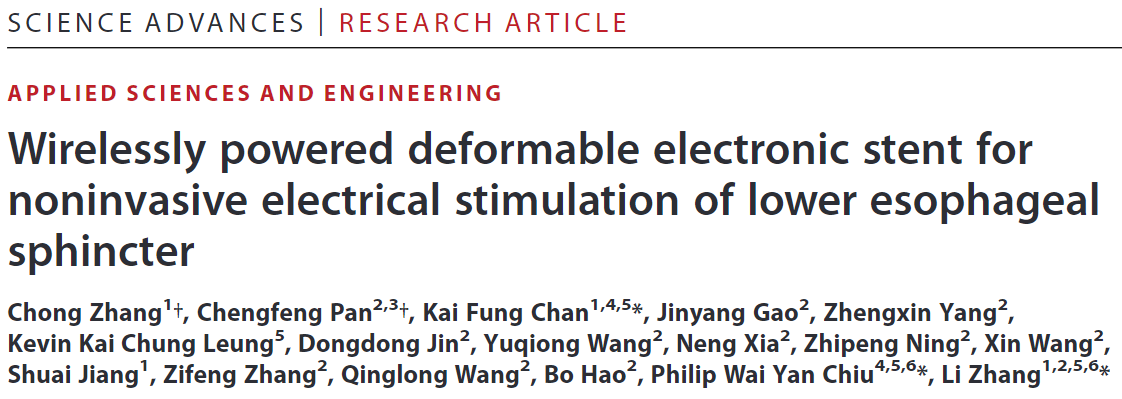
�D 1���o�����ܵ��������֧��ϵ�y������

�D 2���������֧�ܵ�����W���ԡ�
��D2A��ʾ���n�}�M�����һ�N�����]����e����Փģ�ͣ������֧�ܵğo�������ṩ��Փָ����ԓģ�Ϳ�����չ���Aб�͉��s�Ĉ������D2B��C�Č��Y���ܺõ��Ǻ�����Փֵ��չ�F��ԓ�OӋ���Ե����m�ԡ���D2D, E, F��ʾ���n�}�M���i�w�Ⱥ��w��yԇ�����Ծ�Ȧ�����ܡ��M������ʳ���ĉ��sʹ�����Ծ�Ȧ�����½������Ծ�Ȧ��Ȼ�܉�����������������Ӻ��m�·��

�D 3��CT�µĽ��ڟo���f�͡�
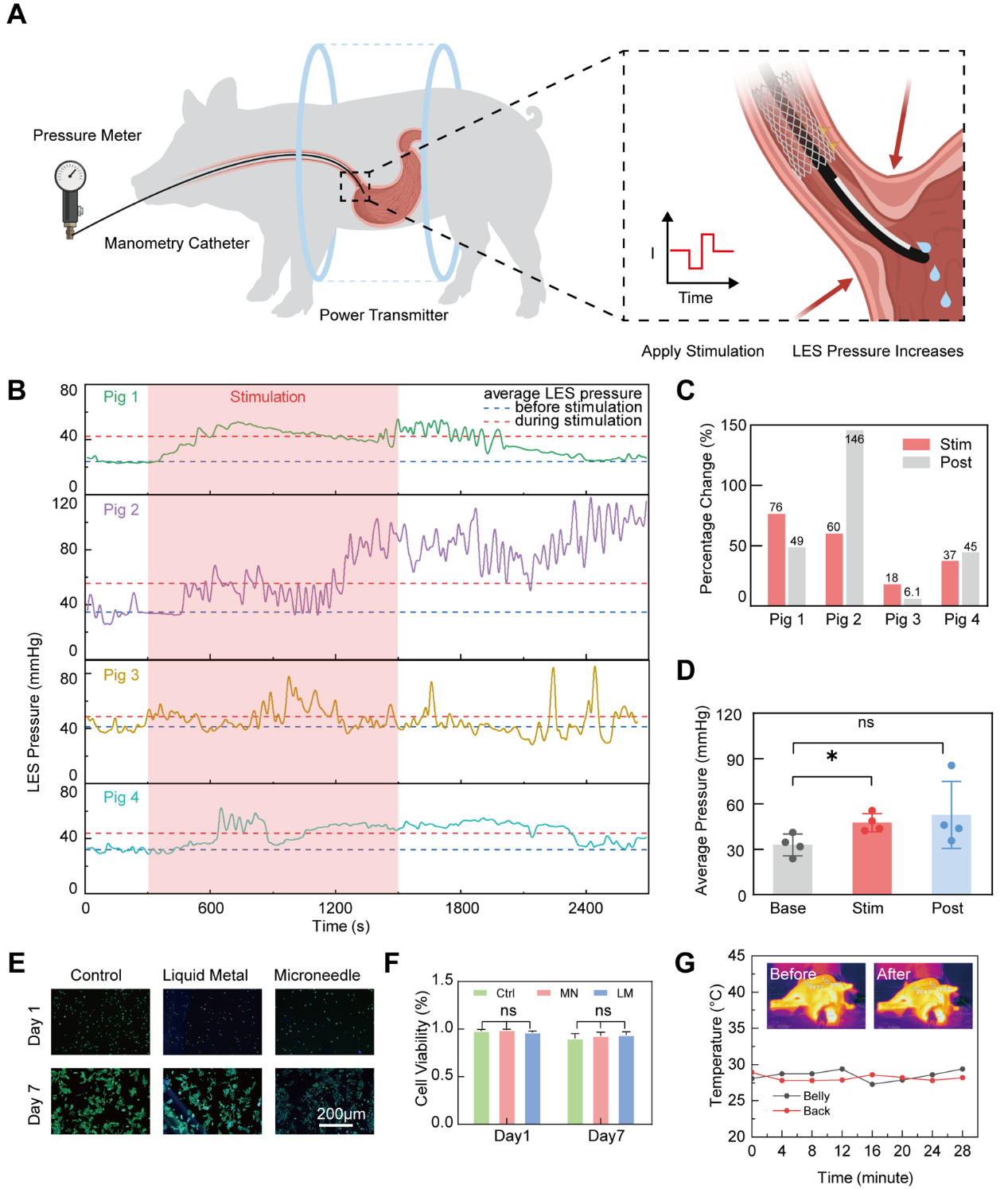
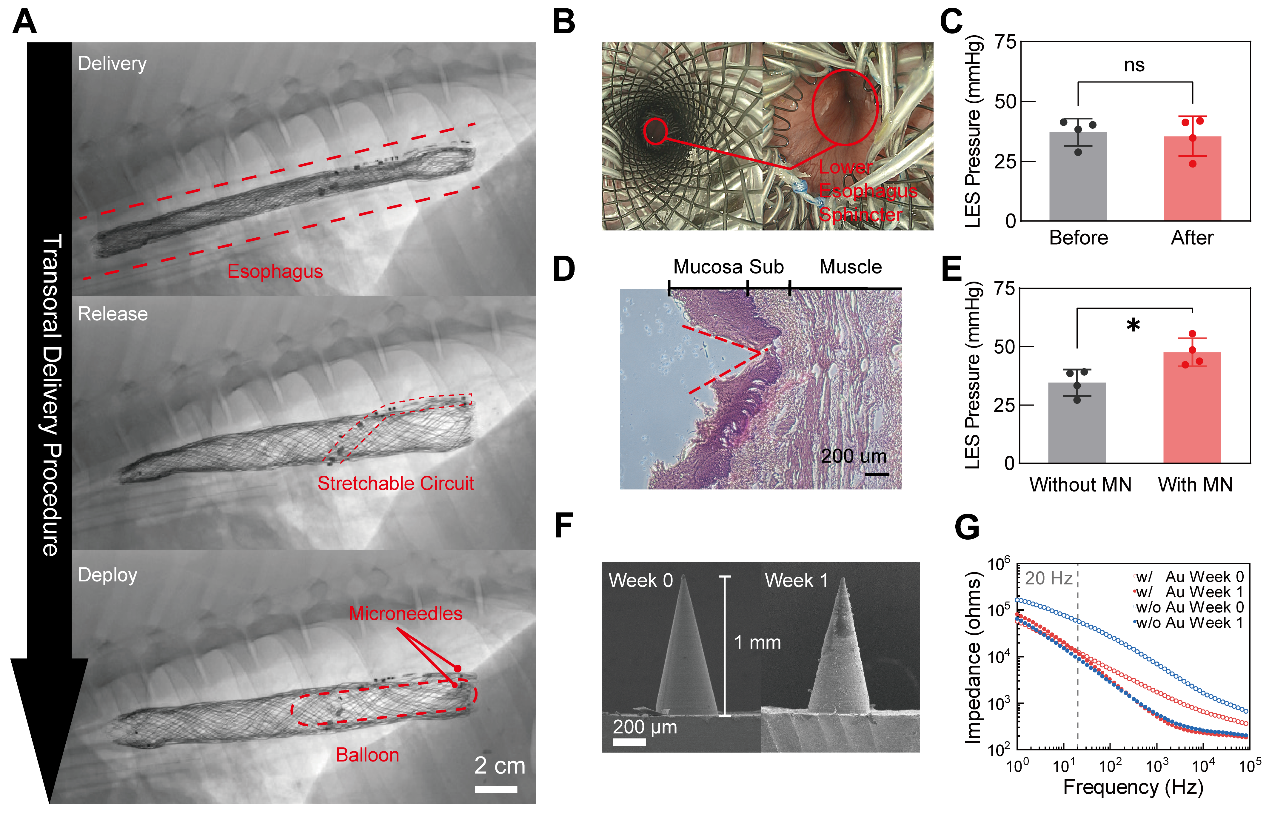
�D 4�����i�w�ȟo��늴̼�����Ч���c��ȫ����C��a �o��늴̼�����O���cԭ����b 늴̼�ǰ�к����^�i���S�T����׃����c 늴̼��^�����Լ�ֹͣ���S�Tƽ������������d늴̼�ǰ�к����^�i���S�T����ƽ��ֵ��e��f Һ�B�����Լ���c��ʳ����Ƥ��������������g �o�������^�����i��Ƥ�Ĝض�׃����
���i�w�Ȍ���������ʮ����B�m늴̼�����ʹ���S�T�����@�����ӣ�����ֹͣ�̼���һ�Εr�g���S����u˥�p�����ʉ�����ԓ�Y�������������B�m늴̼�������һ�N�ί�θ�ᷴ������Ч�ֶΡ�
����n�}�M�����һ�N�ɴ����o�����ܾ�Ȧ���OӋ˼·�����m����ͬ�w�͵IJ��ˣ����OӋ�˱�y�Ŀ��ƺУ��M���˷������ܵ��������Ӱ��ճ���ӡ�����ҕ�l�������wģ��չʾ�˿ɴ����o�����ܾ�Ȧ�Ŀ����ԡ�
���Y���ԣ������������һ�N�������֧�ܣ�����ʳ���S�T�ğo��늴̼���ͨ�^��ǻ�f�͵ķ�ʽ�������������ȵğo���\���c�ί��ṩ���µ�˼·��
�@��о��õ�����о��Y���֣�RGC������ۄ��¿Ƽ���ITC������鶻������CFG���д�-�Ї��ƌWԺ�������M���g�о�Ժ�C�����c����ϵ�y�ό���ҡ���������аlƽ�_��InnoHK�����t���C���˄��¼��g���ģ�MRC����֧�֡�ԓ�����õ�������Ĵ�W�w���ʽ��ڣ��Լ��б���W�ߕxꖽ��ڴ��������͎�����
ԭ��朽ӣ�https://www.science.org/doi/10.1126/sciadv.ade8622
������������������n�}�M�����һϵ���{�C���ˣ����F�˪Mխǻ���ȵĵğo���f���Լ������t�W���ã����������ڿ��ϰl���˶�ƪ�W�gՓ�ġ�
�����о��ɹ����£�
[1] Adv. Mater., 2022, 34(34), 2201888�������יC���˼�Ⱥ����ȥ��đ��֧�܃ȼ�������Ĥ��https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202201888
[2] Sci. Adv., 2022, 8(40): eabq8573�����д��_�l���ſ������C���ˡ��ί��ж������ж����ܾ�Ĥ��Ⱦ��https://www.science.org/doi/10.1126/sciadv.abq8573
[3] Sci. Rob, 6(52), eabd2813���͙C���˺͂��y�C���˽Y�ό��F�w�ȪMСǻ���Ŀ��ٸ߾����f�ͣ�https://www.science.org/doi/full/10.1126/scirobotics.abd2813
������Ĵ�W�������ڈF���퓣�http://www.cuhklizhanggroup.com/
- �|�ϴ�W�����۽���/������ڡ�ACS AMI������׃�δ���Һ�B���ټ{��ƽ�_���ڼ�����ˎ���f�ͺʹŹ�������������ữ�� 2024-02-26
- �����������ڡ�����Ӣ�����n�}�M��Adv. Mater.����ͨ�^��������׃�ε�ܛ�|�����Ƃ�߰l����ܵĽ�늏����w 2023-05-25
- �ӱ����������PSU����������\�s�Fꠡ�Adv. Mater.���������ϡ����ؽM�����ГQ����׃����������c�����O�y���� 2023-02-23
