С��ܛ�w�C�����ǽ����C�����I(l��ng)�����Ҫ��֧���ڪMС���g����̽���������w��(n��i)ˎ���f�͡��w��(n��i)�t(y��)���\����I(l��ng)���������Ҫ��ɫ�����գ���۳��д�W(xu��)������F(tu��n)�(li��n)�ϴ��B������W(xu��)�����t���������պ����W(xu��)����Ǭ�����������_�l(f��)��һ��oԴ�o������(q��)��ܛ�w�C���ˡ�ԓܛ�w�C����ϵ�y(t��ng)�ğo�����O(sh��)Ӌ�Ͷ�܂������֣����F(xi��n)��С�ͻ�ܛ�w�C�����ڷ��]���g�Ќ�Һ�w�h(hu��n)�������������W(xu��)��������ָ��(bi��o)�ğo�����O(ji��n)�y�� �о��ɹ���Battery-free, wireless, and electricity-driven soft swimmer for water quality and virus monitoring������ˮ�|(zh��)�Ͳ����O(ji��n)�y�ğo늳ء��o��������(q��)�ӵ�ܛ�w��Ӿ�C���ˣ����}����2024��1��10�հl(f��)����Science�_�ū@ȡ�ӿ�Science Advances�s־��

С�ߴ�C�����������ڪMС�ͷ��]���g���\�Ӵ�����ˣ�С�ߴ�C�������ڴ�����£����������w��(n��i)����(zh��)�Эh(hu��n)���O(ji��n)�y�������t(y��)�W(xu��)�z�y��һ�������b����
�錍�F(xi��n)����΄�(w��)���C�����b��������Ҫ�ǟo���ģ��κ��K���Ġ��O���������������\�ӣ��@��Ҫ��C�����(q��)�Ӻ͂��Д�(sh��)��(j��)�xȡ����ǟo�����ģ����⣬�C������߂����������������ָ��(bi��o)�Ķ����P(gu��n)ϵ���C���˱O(ji��n)�y���������ܻ��ď�������˶�Ĺ���Ҫ�������������ڙC����ϵ�y(t��ng)֮�����ɸ����ģ�K�����@�ݱ،��C���˵�С�ͻ���������(zh��n)��
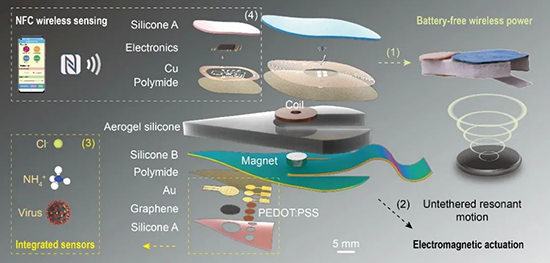
ԓ�о��Թܵ����������ӣ�չ�F(xi��n)�˴�С��ܛ�w�C����ϵ�y(t��ng)�ڷ��]�h(hu��n)�����ضȡ��x�ӺͲ����ęz�y������ԓ�о�չ�F(xi��n)���ڷ��]���g�£��C�����(q��)�ӵğo�����͟o늳ػ������ҟo��ȡ���C�����b�ü��ɟo�������xȡ�O(ji��n)�y��(sh��)��(j��)���˟o�������g(sh��)����������_�l(f��)�w��(n��i)�����t(y��)��ܛ�w�C����ϵ�y(t��ng)���Ԍ��F(xi��n)�C���˵��w��(n��i)�O(ji��n)�y���w��(n��i)�����t(y��)�����ܡ�
ԭ��朽ӣ�https://www.science.org/doi/10.1126/sciadv.adk6301
��Ҫ���ߺ���

��������۳��д�W(xu��)�����t(y��)�W(xu��)���̌W(xu��)ϵ�����ڣ���ʿ����(d��o)�����������ƌW(xu��)ԺԺʿ�����RGC Fellow�����҃�(y��u)������ƌW(xu��)���𣨸۰ģ��@���ߣ�����ʡ�����Ƽ��uՓ����(chu��ng)��35�ˡ��о������������������������t(y��)���I(l��ng)��đ�(y��ng)�á�

�����t�����B������W(xu��)���W(xu��)�c���պ���W(xu��)Ժ���ڣ���ʿ����(d��o)�������Ҽ������˲��Ŀ�@���ߡ��о�������Ҫ�۽������W(xu��)�c��������ǰ�ؽ����I(l��ng)���������չ���������������t(y��)�W(xu��)��(y��ng)���е��P(gu��n)�I�ƌW(xu��)���}���l(f��)չ�������Ի���һ�w�������ɻ����������W(xu��)�O(sh��)Ӌ����Փ��

����Ǭ���������պ����W(xu��)�����c�t(y��)�W(xu��)���̌W(xu��)Ժ���ڣ��������L���W(xu��)�ߡ��нM������ǧ��Ӌ�����Ŀ���x�ߡ��о������{��늴��ס���(x��)���\��������оƬ��������С�

��Ƿ壬��۳��д�W(xu��)�����t(y��)�W(xu��)���̌W(xu��)ϵ�о��T����Ҫ���������t(y��)���{�C���ˡ�ܛ�w�C���˺Ϳɴ����|�X����������о���
- ���A��W(xu��)�w�ۋȈF(tu��n)� AFM�����׳߶ȵ��o��(q��)�������˹��������M(j��n)չ 2025-01-18
- ���A��W(xu��)���緶����һ���B�l(f��)��ƪ��Adv. Funct. Mater.���������о��M(j��n)չ 2024-12-06
- ����/����ʯīϩ�о�Ժ���ҷ������G�h�ͱ���Nano Lett.������ʯīϩ/đ����Һ������(q��)���͟���׃ɫ�{(di��o)�������Ę�(g��u)������(y��ng)�� 2023-05-24
- �����������܈F(tu��n)� Adv. Sci.���ܿ�܉���l(f��)�ĭh(hu��n)����(q��)���� 2025-04-30
- ������܊��/�܊μ���ڈF(tu��n)� Adv. Sci.����ܭh(hu��n)����֬�о������M(j��n)չ 2024-11-24
- UCLA�R�������� Nat. Mater.�����߹���ݔ�����(q��)����ʎ���������ܛ�w�C���� 2024-10-26
�\���P(gu��n)ע�߷��ӿƼ�

- ���ܹ��A��朆���������22��...
- �������C����500+ˎ��...
- ���HƷ�ơ�ǰ�ؕ��h�cչλ�D...
- ������AI�ǿء���Ч�����x��...
- 2025�ؑc����չ���c������...
- ���a(ch��n)������٣�������^�Ƽ�...
- 2025Ϳ��ԭ���x�ϴ��
- �Ј���300�|��PMEC China ɫ...
- ����ע�ԣ�2025����������չ...
- ���a���υ��^�A(y��)��ӛ���öY��...
- �ۺ���l(f��)���ИI(y��)���g(sh��)��Ӗ(x��n)����...
- �㽭��W(xu��)�Ǿ�܊���������F(tu��n)�...
- �����ִ�Źٱ����ڡ�������...
- �п�Ժ�{����Դ�����ܡ�����...
- �V�t(y��)��Ժ���١��V���T��ܰ N...
- �������i�w/���������...
- ����炐�ȁ���W(xu��)���h����...
- ����������W(xu��)���s�����i�w...
- �Ї��ƴ���Ƙ�/�uꐈF(tu��n)� JA...
- �Ͽƴ��N�x�F(tu��n)� Nat. Comm...
- �Ͼ���W(xu��)�����ڡ����ı� PNA...
- �Ĵ���W(xu��)����/����|�F(tu��n)ꠣ�...