ܛ�w�C�����ڭh��̽�y����Ϣ�ɼ����o����Ԯ�������b�䡢��-�C-�h���������I���ЏV����������Ŀǰ�����ܛ�w�C�����\��ģʽ��һ���o�����F��h���m�����\���c�h��������֪�����푑�ܛ�w�C���˾��д̼�Դ�S����푑����ٺ߭h���m���Եȃ��ݡ��F�еĹ���������ͨ�^�����Ի��|�����ϸ������ό��F�����^�Y�������W���ܺ;ֲ�푑����{�����^������˽Y��/���ܿɾ���ܛ�w�C���˵��_�l����ǰ���Y����������ӵ�����푑������о��^�٣���Ҫ���������y�Ծ��_�fͬ���ϵęCе׃���Ժ��푑��ԡ���ײ��ϣ���������z��ͨ�������^�߱ȱ���e���܉��ṩ�������۵���·�����p�ٹ�Wɢ��/����pʧ���Ķ���߹���D�QЧ�ʣ����@K�w��ײ��ϵĸߺ���������������ܡ����֮�£��w�SĤ��MFF�������^�Y���͙Cе�������{���ԣ��錍�F���^�Y�������Ŀɾ��̹�������ṩ�������زġ�
���yMFF�Cе�����^��y�Ԍ��F��Ч���ԡ���ǰ����ȱ��һ�N���ԣ��܉�����������Y���������c���ܷ�����`�����c�ɾ����ԣ���ͬ�����F�Y�����Ч�����Cе��׃���ԡ��ӿ��OӋ���c�h����֪���ܡ�MFF�ڽY�������W���ܷ���߂���OӋ�ԣ������˷��I�������_�l�ԽY�����Ч�����������߂䃞���Cе���ܵĸ����ܹ�����������x����ͬ����늌W��֪����������늴�ݗ�䣨EMR����һ�N�V�������ڭh���е���Ⱦ/Σ��Դ���Ķ������ӑB�z�y�����������a/����h����ȫ������Ҫ���x��Ŀǰ����δ�Эh��EMR��֪�����������h�����m���\��ܛ�w�C���˵Ĉ����

�D1. EMR��֪�������MFF����
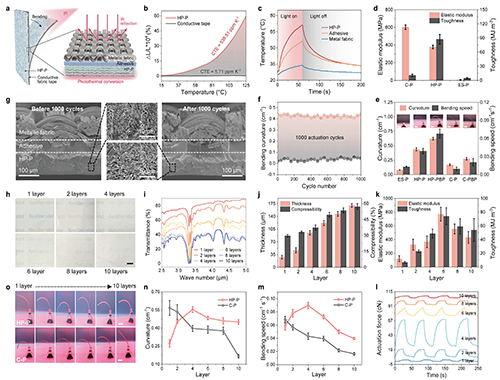
�D2. �Cе-���fͬ������HP-P����

�D3. �ቺ�ɾ��̹�������͙C����
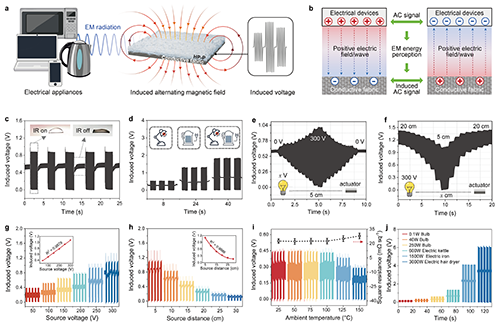
�D4. EMR��֪��ꑵؙC����

�D5. EMR��֪��ˮ���̓ɗ��C����
����HP-P��Ĥ����ˮ�Ժ��Ч��������ˮ�Ϯa��Marangoni���M�������F���ٿصĶ��������\�ӡ�ͨ�^��HP-P����߅������BP��������D�������������Marangoni���M�������F�����w�b�d���\ݔ��ˮ���Ԍm��Խ���ܴˆ��l�_�l��ˮꑃɗ��C���ˣ�ͨ�^�㲿BP�D���������Ч�����Y�Ϸ��������п���нY��������˸����ͷ����ԣ����F��ˮ�Ͽɿ��\�ӡ�ԓ�ɗ��C���˟oՓ��ˮ��߀��ꑵؾ��ܷ�����֪EMR���@ʾ�����`��ӑBEMR�z�y�������D5����
Փ����Ϣ��M Wu, X Zhou, J Zhang, L Liu, S Wang, L Zhu, Z Ming, Y Zhang, Y Xia, W Li, Z Zhou, M Fan, J Xiong*, Microfiber Actuators With Hot-Pressing-Programmable Mechano-Photothermal Responses for Electromagnetic Perception, Advanced Materials, 2024, 10.1002/adma.202409606.
ȫ��朽ӣ�https://onlinelibrary.wiley.com/doi/10.1002/adma.202409606
�n�}�M�����https://www.x-mol.com/groups/xiong_jiaqing
- ���ִ�W����÷���ڈF� JACS�����ڳ�����-���r�fͬ���Ԙ��������܆νM���z𤄩 2025-06-29
- ���A������W�����n�}�M CEJ���o���l��̫��ܹ�ۺ��Ƃ�����ܡ����h���m���ԺͿɻ���ˮ���z������ 2025-06-26
- ��h�������l�ֽ��ڡ���P�����/佽���������P���ڡ��O�������� Mater. Today �C�����������w�S�������I���쑪���r�� 2025-06-25
- ������������� Nano Energy�����ڮ��|���湤��Janus�Y���ͺϼ{���w�SĤ���F������ȫ�̑B䇽���늳� 2025-05-20
- ������褲����ڡ���������� AFM������ؓ�d���S�ص�PLLA/PCL�{��ܗ�w�SĤ�Ķ����Ƕȅfͬ��ֹ�g��ճ�B 2024-09-02
- �Ͽƴ���������ڡ�����˸�����/�칤�ܽ��ڣ����ڸ�����늴Ÿɔ_���εĺ˚�PANI/PVDF@PANI�{���w�S�ͺ�Ĥ 2024-02-20
- �����������܈F� Adv. Sci.���ܿ�܉���l�ĭh������� 2025-04-30
